My first experience using DC motors was for a small elevator for a science project back in school. Although I had no idea, that day would become only the first day of my experience with motors.
Of course, the motor worked great during the testing phase, but it failed to perform when it counted. I used wood to build the elevator shaft frame, and I used a pulley system with strings to lift a cardboard box up and down. (This was before I learned gear/pulley ratios, so my elevator was more like an ejector seat than an elevator.)
For the motion control, I used a battery, a switch, and a DC motor for my project. Long story short - since I was so focused on testing, my battery actually ran out of juice before the demonstration. In hindsight, I should have switched the battery just before the demonstration. I still passed the class since someone witnessed the elevator working and vouched for me.
That was my first experience with a DC motor. Can you guess which type of DC motor I used? We'll get back to this later.
Types of DC Motors
There are two types of DC motors - brush and brushless. They are both DC permanent magnet motors since they both use a segmented permanent magnet rotor. The first difference comes from their names. One uses brushes to mechanically commutate its windings, and the other uses a driver to electrically commutate its windings. With built-in feedback for speed regulation, these motors are typically used for speed control applications where multiple speed settings are necessary.
Driver or No Driver?
Brush DC motors are also known as self-commutated DC motors. Its design and construction allow it to operate without a drive circuit, which I will cover later. Brushless DC motors cannot self-commutate, so they require a drive circuit, which uses transistors to direct the current to different winding coils of the motor.
Design & Operation
A motor energizes a set of electromagnets in its stator in a sequence to create rotation with its permanent magnet rotor. A north pole on the stator will attract the south pole on the motor. This is the operating theory for all permanent magnet DC motors. The way they do it is different.
To understand why these motors behave like they do, we need to understand their design.
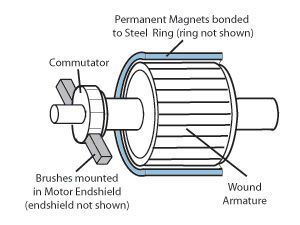
Here are what brush DC motors and brushless DC motors look like inside. In the image below, we show a brush DC motor with permanent magnets in the stator instead of the rotor. Sometimes, the permanent magnets can be in the rotor depending on the manufacturer. By having the winding coils in the rotor, heat doesn't radiate as well as having the winding coils in the stator.
Brush DC Motor
 |
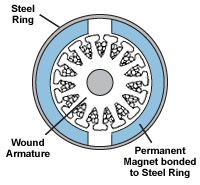 |
The top-left image shows the commutator and brushes. The bottom-right image shows the same motor from the front view. An electrode in the form of brushes and commutator are set inside of the motor. The commutator rotates with the rotor, and the stator is stationary. In this motor, there are two permanent magnet poles - north and south.
When the power supply is connected to the stationary brushes, a specific set of electromagnets (coils) are energized in the rotor, which attracts the next magnet pole and repels the current pole of the stator. Once the rotor is rotated to the next set of electromagnets, the brushes mechanically switch to the next set of electromagnets in the rotor. This process keeps repeating until the power supply is disconnected. The direction of the motor can be changed by switching the polarity of the power supply.
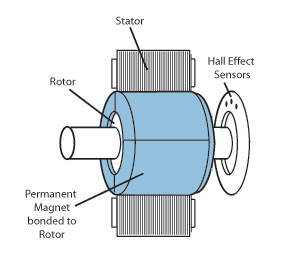
The next image shows a brushless DC (BLDC) motor with its permanent magnets on the rotor instead of the stator, which is the type we make. One benefit of this design is that the stator winding coils, which produce the most heat, can dissipate the heat faster than a motor with its coils in the center.
Brushless DC Motor
 |
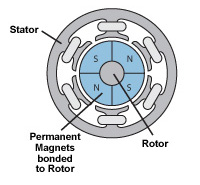 |
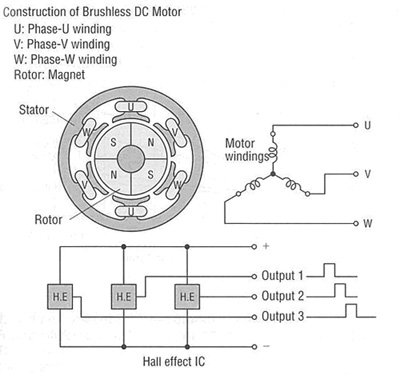
The top-left image shows the rotor, stator, and the hall effect IC in the back of the motor. Unlike brush DC motors, brushless DC motors use a dedicated driver circuit to monitor the feedback from the motor, and the driver uses transistors to electrically excite the stator poles. Oriental Motor uses the term "brushless motors" since we offer these motors with either AC or DC input drivers. The bottom-right image shows the front side of the motor. We have 6 stator poles (electromagnets) and 4 rotor poles (permanent magnets) in this motor.
The Hall Effect IC senses the permanent magnets in the rotor as it rotates, converts from analog to digital, and then sends the data back to the driver circuit. The driver then uses the data to determine the proper timing for phase excitation. The feedback is also used to regulate the motor speed.
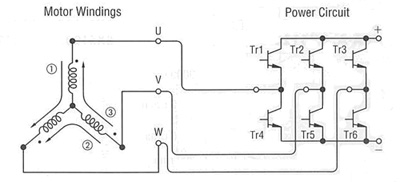
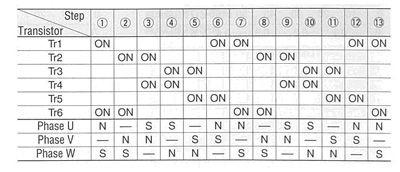
The image below shows how a brushless motor driver's power circuit turns specific winding coils on and off with transistors. We are showing a 12-step transistor excitation sequence with U, V, and W windings in the motor. After 12 steps, the cycle repeats.
Most of our brushless DC motors are now 10-pole motors. The output resolution of the Hall Effect IC is # of Hall Effect IC x rotor poles, so that's 3 ICs x 10 poles = 30 pulses per revolution. Some brushless motors, such as the BXII Series, offer an encoder for applications that require higher resolutions for better speed regulation or even position control.
Closed-Loop Speed Regulation
Another obvious difference between brush DC and brushless DC motors is that one requires feedback in order to work properly. Feedback signals from its Hall Effect IC provide rotation data and are necessary for the proper timing of phase excitation. With closed-loop feedback, the driver can also sense when the motor rotation is lagging behind the commanded speed and increases voltage and current to maintain speed regulation.
With closed-loop feedback, Oriental Motor's brushless DC motors regulate the speed to about +/-0.2% of the set speed. With encoders, this is even better at +/0.05% even with changing load conditions, like different-sized boxes on a conveyor.
Advanced brushless DC motor drivers may offer some unique features that are not available to simple brush DC motor controllers, such as stored speed profiles and RS-485 communication. The feedback and current sensors in brushless DC motors can provide a torque limiting function that can be useful for tensioning applications. Although initial costs are higher for brushless DC motors, their benefits should be considered when choosing a motor.
Spee/Torque Performance
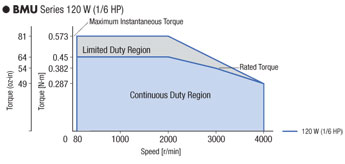
Both brush DC and brushless DC motors offer similar performance. Their speed torque curves are the same as below. For brush DC motors, speed and torque can be controlled by varying the input voltage to the motor. However, increased voltage can sometimes increase heat too much and reduce the motor's duty cycle.
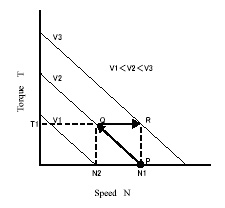
Brushless DC motor drivers limit their speed torque curve for the best possible performance and temperature, so you can always expect the same great performance every time. For brushless DC motors, the driver's excitation sequence needs to speed up in order to rotate the motor faster.
Summary/Comparison
You might have guessed that I used a brush DC motor in my elevator project.
While brushless DC motors are far superior, a brush DC motor got the job done for my simple one-off project. Plus, I didn't know how to build a driver, and I really needed to keep the costs low.
Here's a summary of the difference in benefits between brush and brushless DC motors.
.png?width=1024&height=768&name=Brushed%20vs%20brushless%20motors%20comparison%20chart%20(Canva).png)
While brush DC motors are simple and cheaper to operate, they are typically used in applications where long-term life or maintenance is not a major concern. The brushes are always in contact, so friction will wear them down eventually, and they need to be replaced periodically. This could dictate unwanted changes in design since motors need to be accessed for maintenance. Sparks from brush commutation limit the environments brush DC motors can safely operate in.
The only components in contact inside a brushless DC motor are the ball bearings, so they do not require periodic maintenance. Brushless DC motors are also quieter and last longer than brush DC motors. Brush commutation is also a major source of electrical and audible noise that can affect other electronic signals or require noise reduction measures. Since brushless DC motors offer higher power efficiency, these motors can be more compact due to the high torque torque-to-weight ratio and more torque per watt. Lastly, the Hall Effect sensors in brushless DC motors regulate the speed better even with load fluctuations.
Due to the growing demand for higher performance and longer life, brushless DC motors are becoming more popular than brush DC motors. While brush DC motors are still commonly used in household appliances and power tools, brushless DC motors are more versatile for a wide range of applications from conveyors to AGVs.
FYI: here's a short article that compares brushless DC motors and brush DC motors to AC motors.

Enjoy a short video about our  .
.
Thanks for reading my article. Please subscribe for monthly updates.


