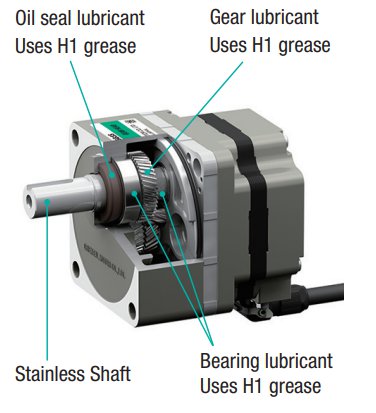
Selecting a gearhead for a stepper motor is like picking out the right shoes for the occasion. Sure, you can wear Air Jordans on a football field, but they're not better than a pair of regular cleats. Similarly, you can use a harmonic gearhead to drive a unidirectional conveyor, but you may be overpaying for its zero-backlash capability when you don't have to. Picking the right gearhead can ensure the best balance between performance and budget.
Read More
Topics:
Stepper Motors,
Absolute Positioning,
Alphastep Hybrid Control,
Motor Sizing,
Gearheads,
Motion Control Basics,
Incremental Positioning
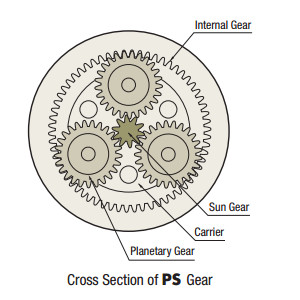
Gearheads play a crucial role in motor performance optimization. Each type of gear offers its own features and characteristics, and the gear ratio alters a motor's output torque and speed. By carefully selecting the optimal gear type and ratio, engineers can fine-tune motor performance to align precisely with the application requirements.
Read More
Topics:
Speed Control,
Motor Sizing,
BLDC Motors,
Gearheads,
Motion Control Basics
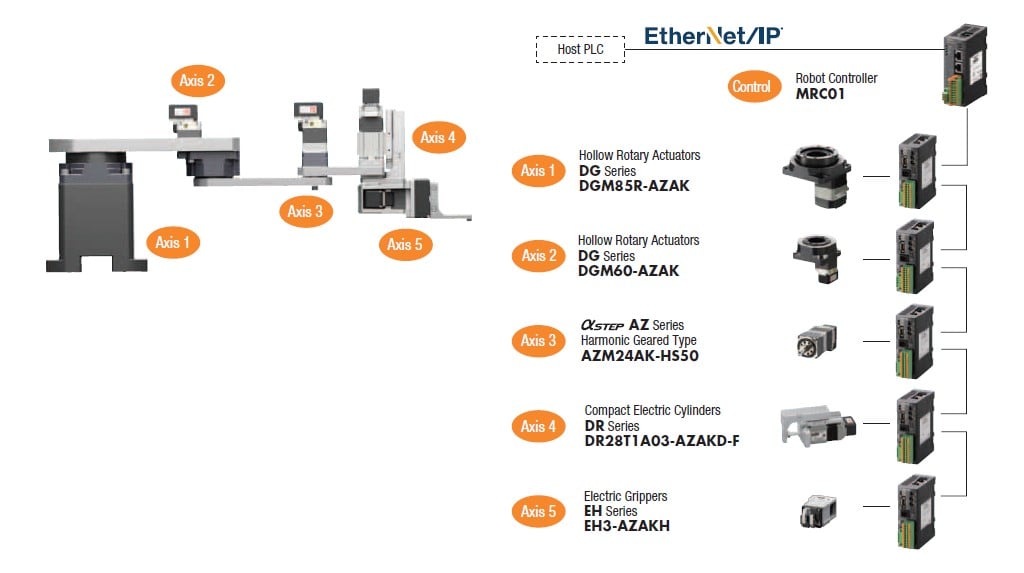
Robotics automation can be easier to build than you think. Here's an example of how a 5-axis SCARA robot can be built in-house with off-the-shelf products.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
Motor Sizing,
VIDEOS,
Software,
Network,
Application Examples,
Rotary Actuators/Index Tables
Many motor manufacturers offer a motor sizing tool to help with product selection, but if you don't know how to use it, you may still end up paying for it in the long run.
Read More
Topics:
Speed Control,
Motor Sizing,
BLDC Motors,
Food & Packaging,
Conveyors,
Factory Automation
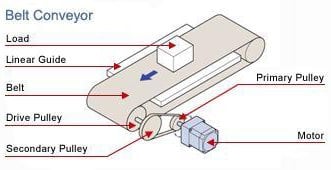
Which type of electric motor do you size for your conveyor, XYZ table, or robot? Before you select one, you must understand the characteristics of each type of motor in the market.
Read More
Topics:
AC Motors,
Stepper Motors,
Speed Control,
Motor Sizing,
BLDC Motors,
Washdown,
Servo Motors,
Motion Control Basics,
Conveyors
Besides load torque, acceleration torque, speed, and load inertia, overlooking certain sizing parameters during the motor sizing process can literally make or break your machine.
Read More
Topics:
AC Motors,
Stepper Motors,
Speed Control,
Motor Sizing,
BLDC Motors,
Gearheads,
Servo Motors,
Motion Control Basics
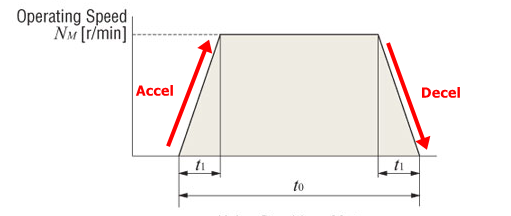
Now that we understand the calculations behind load torque and load inertia, we're a little closer to motor selection. You might be wondering why I separated load torque and acceleration torque calculations. That's because in order to calculate for acceleration torque, load inertia and speed must be calculated first.
Read More
Topics:
AC Motors,
Stepper Motors,
Alphastep Hybrid Control,
Linear Actuators,
Speed Control,
Motor Sizing,
BLDC Motors,
Servo Motors,
Motion Control Basics
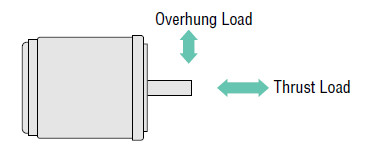
Other than torque or speed, another factor should be considered when sizing motors.
Read More
Topics:
AC Motors,
Stepper Motors,
Alphastep Hybrid Control,
Linear Actuators,
Speed Control,
Motor Sizing,
BLDC Motors,
Gearheads,
Servo Motors,
Rotary Actuators/Index Tables,
Motion Control Basics
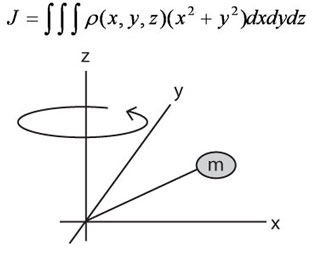
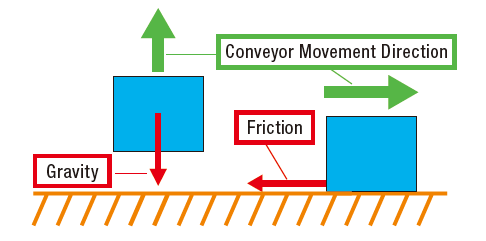
Proper sizing of a motor requires that 3 criteria must be met: torque, load inertia, and speed. For the first part of this Motor Sizing Basics series, I will be explaining what load torque is, how to calculate it for specific application examples, and how it fits into the torque requirement for the application.
Read More
Topics:
AC Motors,
Stepper Motors,
Alphastep Hybrid Control,
Linear Actuators,
Speed Control,
Motor Sizing,
BLDC Motors,
Servo Motors,
Rotary Actuators/Index Tables,
Motion Control Basics,
Conveyors
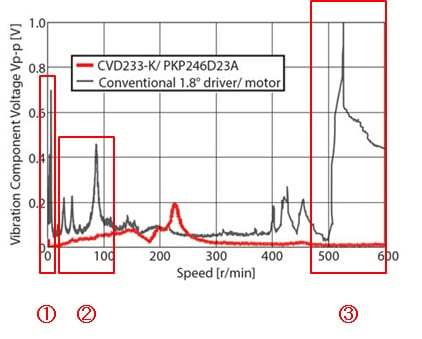
Stepper motors vibrate. It's what they do. To minimize motor vibration, first we need to understand where they come from.
Read More
Topics:
Stepper Motors,
Smooth Drive,
Motor Sizing,
VIDEOS,
Gearheads,
Stepper Drivers,
Incremental Positioning