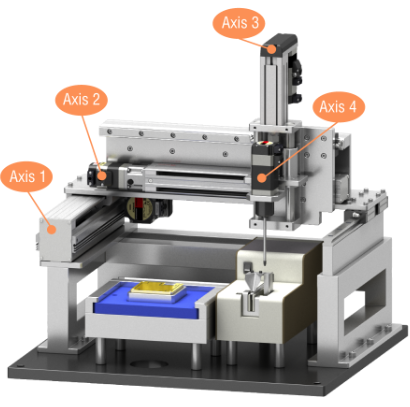
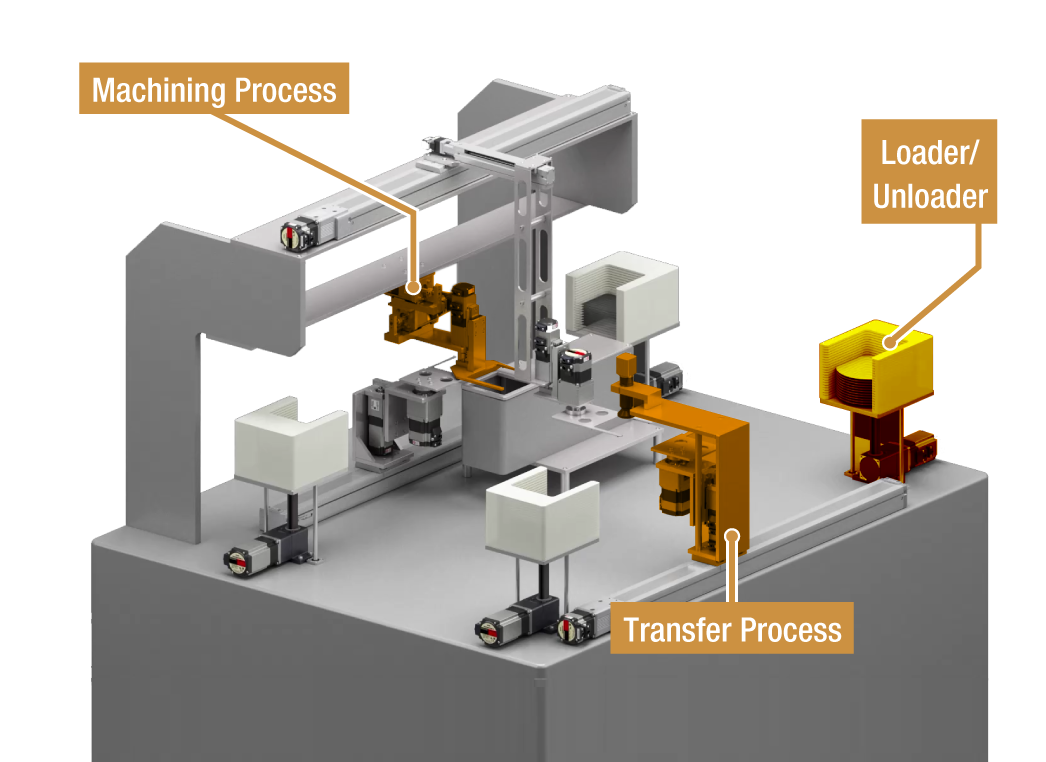
Automating screw tightening is no longer just about speeding up assembly; it’s also about ensuring consistent quality, reducing defects, and enabling scalable production. For automation engineers, one of the most effective architectures for achieving this is a multi-axis Cartesian system that combines precise positioning, controlled pressing, and accurate torque delivery.
In this article, we’ll walk you through how a 4-axis automated screw tightening machine can be built using electric linear actuators, and how Oriental Motor’s integrated motor and actuator solutions can simplify designs while improving performance.
Read More
Topics:
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
VIDEOS,
Application Examples,
XYZ/Cartesian/Gantry,
Case Studies
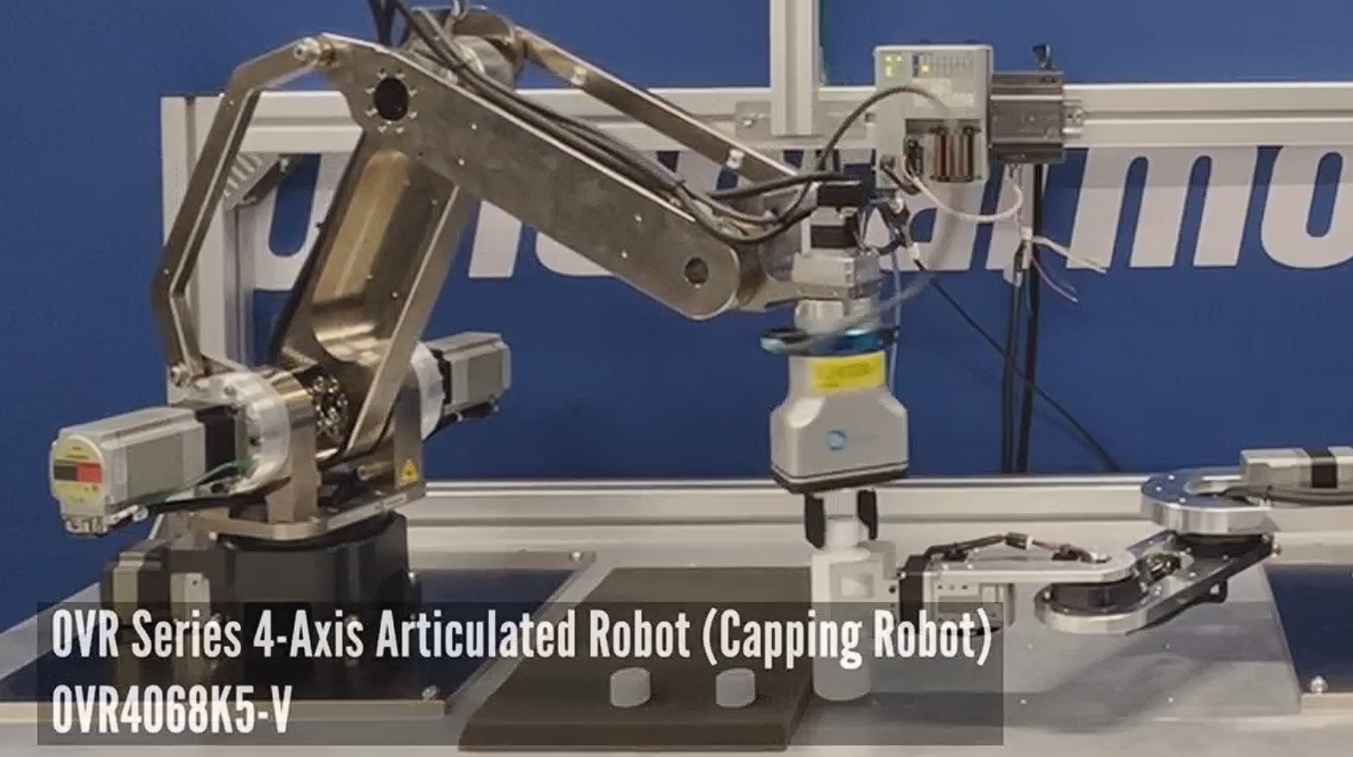
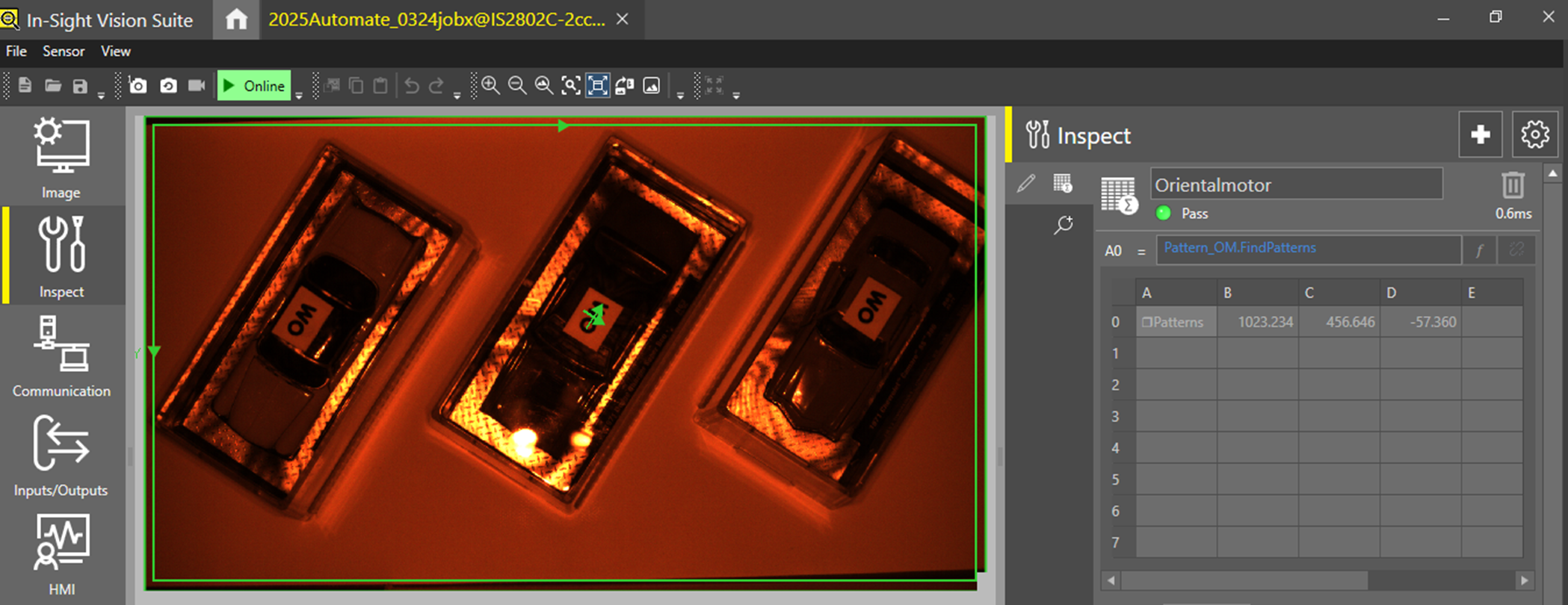
As packaging lines face increasing pressure to run faster, handle more variants, and fit into tighter footprints, automation strategies must balance precision, flexibility, and size. One effective approach is the coordinated use of compact robots integrated with machine vision - an architecture well-suited for highly repeatable tasks like bottle handling and capping.
Read More
Topics:
Robotics,
VIDEOS,
Application Examples,
Food & Packaging,
Bottle Capping,
Product Demos,
Factory Automation
In high-volume manufacturing, every second matters. Although traditional SCARA robots have been a staple in assembly and material handling, their limited rotational range can often cause delays that can keep them from maximizing throughput.
Read More
Topics:
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
VIDEOS,
Application Examples,
Product Introductions
Building a robot is not easy. Programming a robot can be even more challenging without user-friendly software. In this article, I'll explain a few of the MRC Studio's most useful features and demonstrate how the Robot Vision Calibration function can help reduce costs for your vision-enabled robots.
Read More
Topics:
Robotics,
Software,
Application Examples,
Case Studies,
Product Demos
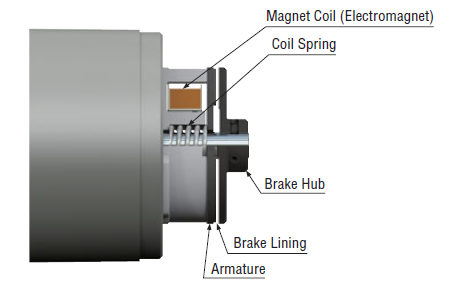
Motors with built-in electromagnetic brakes enhance safety by preventing unexpected movement during power failures, which is crucial for medical applications where precision, safety, and reliability are essential.
Read More
Topics:
AC Motors,
Stepper Motors,
Robotics,
Absolute Positioning,
Linear Actuators,
VIDEOS,
BLDC Motors,
Vertical Lifts,
Application Examples,
Service Life,
Medical,
Laboratory,
Incremental Positioning
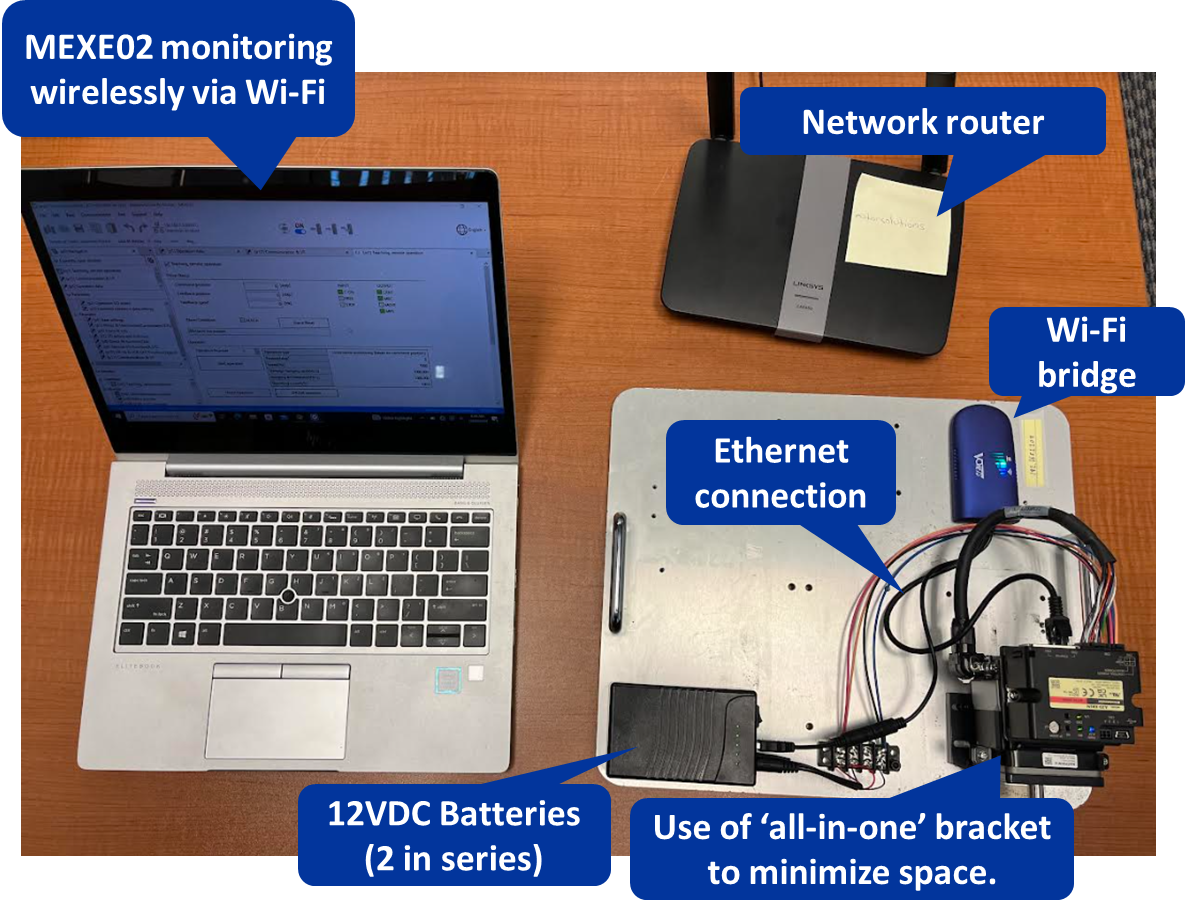
In the factories of the future, wireless motion control will offer unprecedented flexibility for mobile machines and space-constrained applications. This comprehensive guide walks engineers through implementing wireless motion control using Oriental Motor's AZ Series Ethernet Type mini Driver, eliminating cables while maintaining precise motion control.
Read More
Topics:
Stepper Motors,
Robotics,
Alphastep Hybrid Control,
VIDEOS,
Software,
Network,
Product Demos
Interested in industrial robots but not sure where to start? Learn how Oriental Motor's compact and easy-to-use small industrial robots, robot controllers, and software can help simplify robotic automation.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
VIDEOS,
Software,
Application Examples,
Product Introductions,
XYZ/Cartesian/Gantry
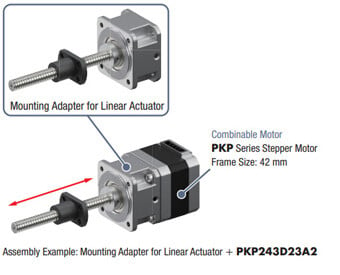
The popularity of micro linear actuators has been steadily increasing, driven by the need to increase productivity in confined spaces. To help meet the demand of the miniaturization trend, Oriental Motor has developed a compact linear actuator that can be attached to an off-the-shelf stepper motor.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Linear Actuators,
VIDEOS,
Application Examples,
Product Introductions,
Medical,
Incremental Positioning
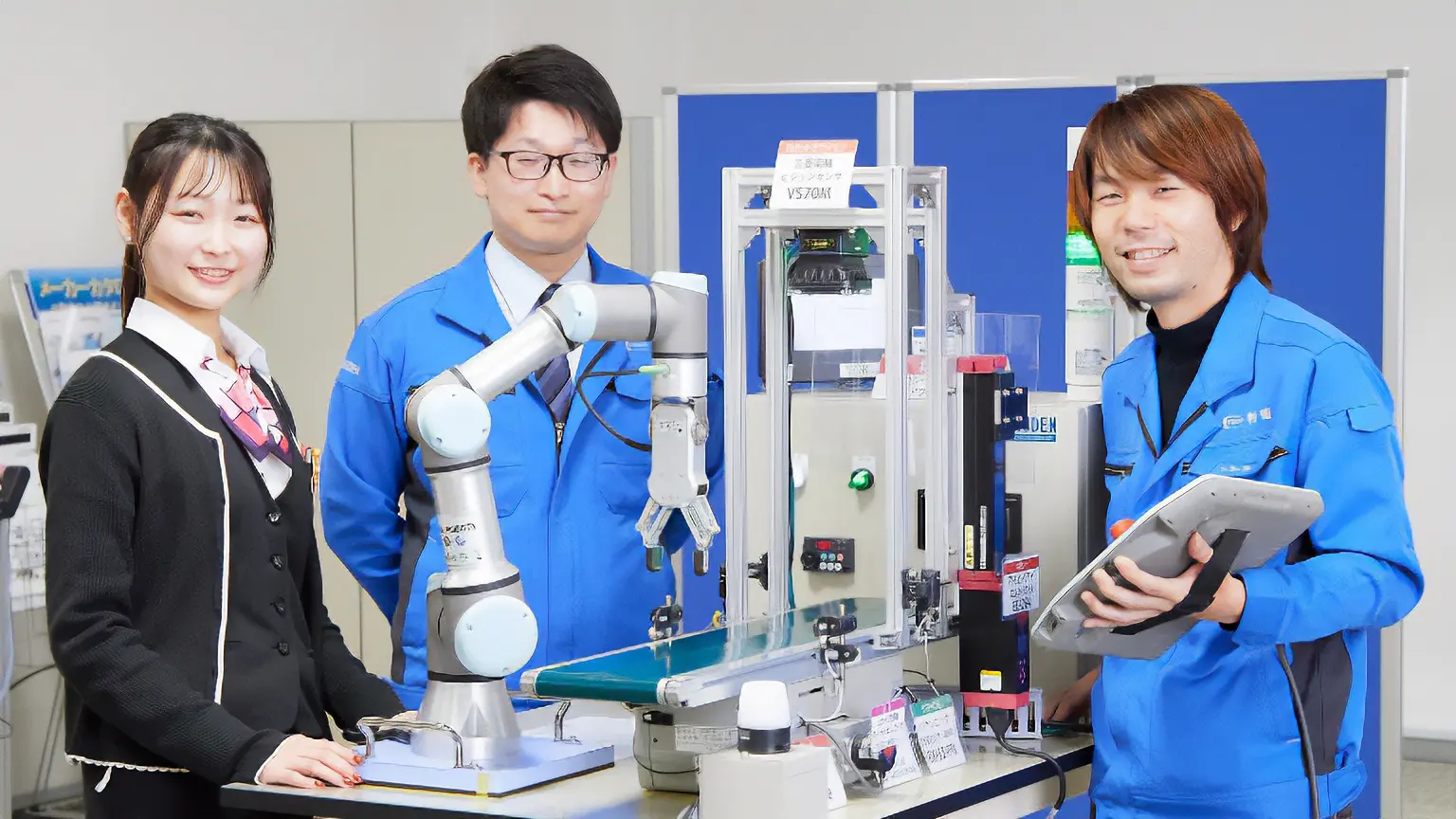
An end effector, such as an electric gripper, is an essential part of industrial robots. More importantly, using the right gripper for the load being transferred prevents damage while improving automation efficiency. In this article, we share how one system integrator has successfully adopted an electric gripper for one of their articulated robots.
Read More
Topics:
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
VIDEOS,
Application Examples,
Medical,
Food & Packaging,
Case Studies,
Factory Automation
The growing demand for semiconductors, driven by technological advancements like AI, IoT, and robotics, makes it crucial to handle these delicate wafers efficiently and precisely. In this article, we will explain how unified features from a family of motors and actuators can simplify automation for semiconductor wafer manufacturing.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
VIDEOS,
Vertical Lifts,
Application Examples,
Wafer Handling,
Semiconductors,
Factory Automation