In the factories of the future, wireless motion control will offer unprecedented flexibility for mobile machines and space-constrained applications. This comprehensive guide walks engineers through implementing wireless motion control using Oriental Motor's AZ Series Ethernet Type mini Driver, eliminating cables while maintaining precise motion control.
|
What's covered?
|
Benefits of Wireless Motion Control
|
Mertis of Wireless Motion Control
| The IIOT (Industrial Internet of Things) enables improved safety, increased efficiency, better decision-making, and faster response by collecting and analyzing data and automating tasks. By eliminating cables, machines can be more mobile, compact, and less costly to make. This can help AGVs and AMRs gain access to tight spaces, or customize production lines for different needs, such as in a modular automation concept. |
Here's what you'll need:
|
|
|
|
|
 |
 |
 |
Required Components
Follow our detailed instructions to build your own wireless motion control system using readily available components and free software.

Step-by-Step Instructions
1. Set up the router
| Connect the network router to the AC power supply. After 30 seconds, the router's LED should flash green slowly (~every second). |  |
2. Check the connections
| Check the connections from the batteries to the driver's CN1 connector. In our case, we used a terminal strip. |  |
 |
Check the connections from the batteries to the Wi-Fi bridge. |
|
Check the connections between the following:
|
 |
3. Power on and check LEDs (make sure the batteries are charged)
|
When powered, the Wi-Fi bridge's LED should be solid green initially, then start flashing blue quickly after ~15 seconds. This means it has connected to the router network. To charge batteries:
|
 |
4. Connect laptop to network
In the laptop's network settings, select the correct Wi-Fi bridge network.
5. Open AZ Ethernet file in the MEXE02 software
| In the MEXE02 software (version 4.18.1 or later), open an "AZ mini Ethernet type - Standard/Geared Motor" file. Make sure to select the "AZ mini" Series. |  |
6. Configure your Ethernet connection setting on the MEXE02 software
Ethernet Connection Setting - Parameters

- Select either Modbus TCP, Modbus UDP, or CC0Link IE field network protocols.
- Enable "Support software connection (MEXE02)" by selecting "0". This is necessary for first-time setup.
- Save the "Port number (MEXE02)". This will be needed later in the Ethernet connection setting.
Open your "Ethernet communication setting".

Ethernet Connection Setting - Parameters

- Choose "Wi-Fi" for "Network adapter (PC)".
- Set the driver's IP address either with dials or parameters (dial takes priority).
- Make sure the "Destination port number" matches MEXE02's port number.
- The host IP address should be in the same network as the driver, and the 1st three octets should be the same (ie: 192.1689.1.###).
- Click "Apply" when done.
- Ping driver to test if network communication is working properly. You should receive 4 replies.
7. Perform a data read operation to load the data.
Close the communication settings. You should be able to perform a "data read" operation, which uploads the stored data from the driver (if any). If it reads correctly, you know you've set up the communication successfully. If there's no stored data on the driver, you'll have to create a motion sequence data file. Just fill in the values you want; like position (in steps), speed, starting/changing rate (acceleration rate), stopping deceleration (deceleration), operating current, type of link...etc. If you don't fill some of the values in, it will use the default values instead.

8. Perform a move, monitor motor status
Once you're done filling the values, remember to perform a "data write" operation to save the data into the driver. Once the data is stored in the driver, you can use the "Teaching, remote operation" to test any of the moves, jog the motor, and monitor the motor status at the same time.

Demo Video
Follow along as Paul Bosnyak, our senior application engineer, demonstrates how to perform wireless motion control with our AZ Series Ethernet type mini driver.
Additional Notes from Paul Bosnyak:
- Ethernet driver allows for Ethernet connection. Many single-board PCs use Ethernet communication, so this can be integrated with a cost-effective host system, such as Raspberry Pi.
- The router and Wi-Fi bridge need to be preconfigured during initial setup.
- The Wi-Fi bridge does not create its own network but simply bridges the existing network created by the Linksys router.
- It is up to the customer (and their IT team) to determine necessary network security.
Discover how combining Oriental Motor's precision motion technology with standard wireless networking creates powerful new possibilities for your next automation project. Contact our team to set up a product consulation.
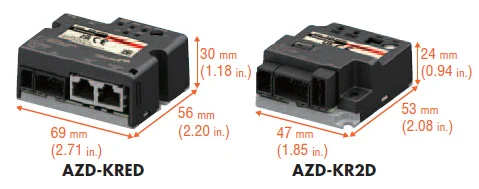
Highlighted Product: AZ Series Ethernet Type mini Driver