Current demand for stepper motors is shifting toward smaller, smarter, and more efficient systems, with the biggest push coming from automation, robotics, medical devices, and compact consumer and industrial equipment. As our customers demand more torque in a smaller package, we've been developing a complete high torque stepper motor line and supporting products to meet these needs.
Read More
Topics:
Stepper Motors,
VIDEOS,
Product Introductions,
Encoders
Building a great machine starts with the right motion components, and Oriental Motor’s PKP Series stepper motors give engineers a reliable starting point with a variety of proven options to choose from. However, when your design demands a perfect fit or finely tuned specs, our custom assembly services take you beyond what standard motors can offer.
Read More
Topics:
Stepper Motors,
VIDEOS,
Application Examples,
Incremental Positioning
Modern automation increasingly demands higher reliability, faster time-to-build, and easier scalability in a smaller package. If you’ve ever wished you had an easy button for motion control, Oriental Motor’s αSTEP Hybrid Step-Servo AZ Series product family lets you build your own compact, modular motion control solution by choosing off-the-shelf products.
Read More
Topics:
Stepper Motors,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
VIDEOS,
Product Introductions
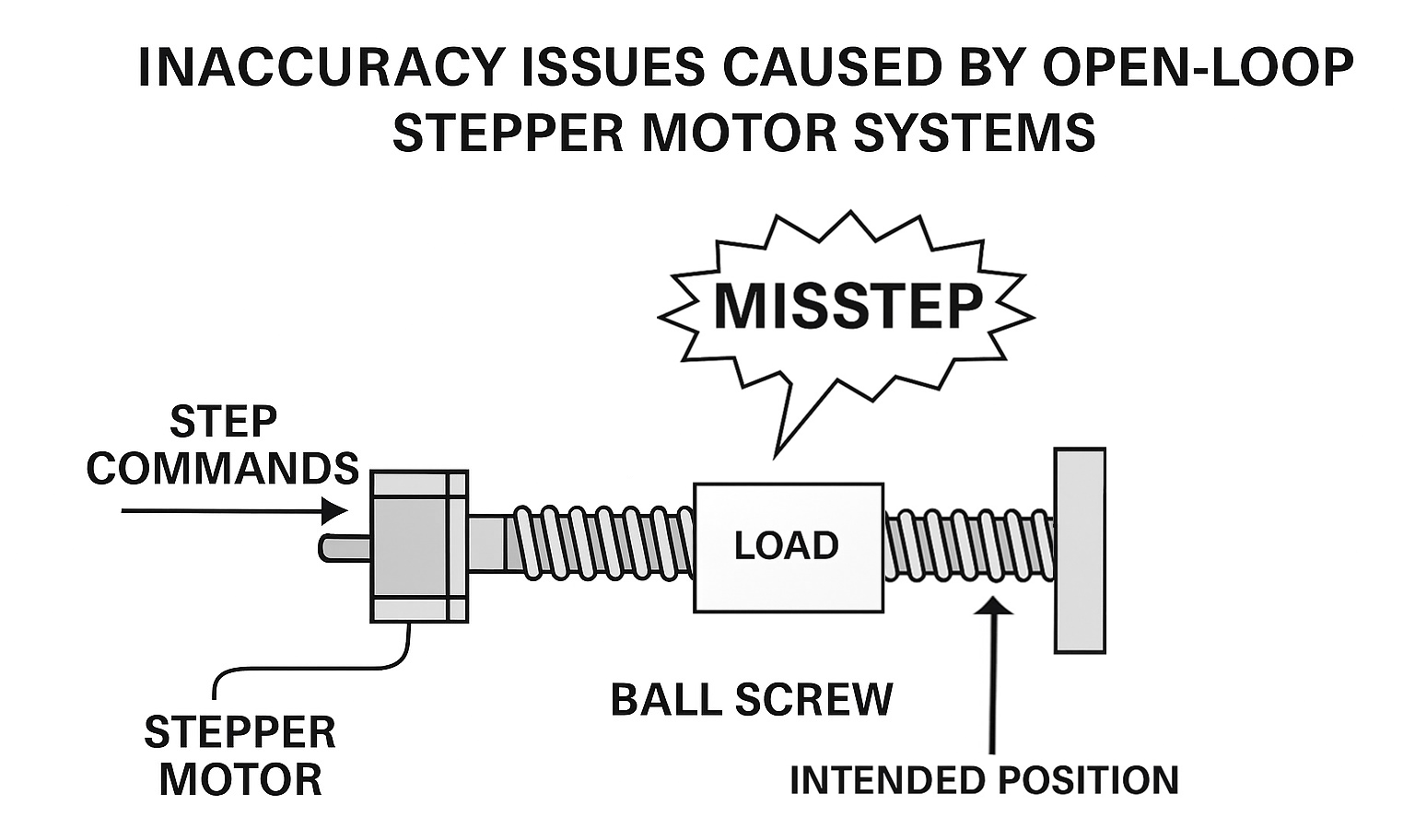
In high-precision automation environments like semiconductor manufacturing, even the smallest error can result in costly defects and downtime. What if you could deliver servo-like precision without the complexity or cost of servo motors?
Read More
Topics:
Stepper Motors,
VIDEOS,
Product Introductions,
Encoders,
Stepper Drivers,
Incremental Positioning
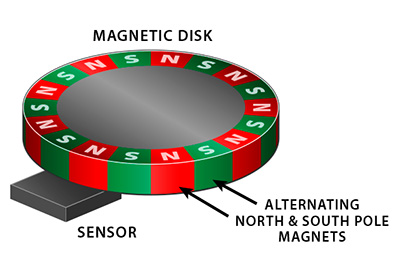
While optical encoders have long been the standard, magnetic encoders are emerging as a compelling alternative due to their durability, cost-efficiency, and versatility. In this article, we’ll compare the pros and cons of both encoder technologies and explain why Oriental Motor's magnetic encoders deserve a closer look for a wider range of applications.
Read More
Topics:
Stepper Motors,
Servo Motors,
Encoders
CVD Series stepper drivers are the best choice for PKP Series high-torque stepper motors due to their unique abilities to reduce different types of motor vibrations and optimize performance.
Read More
Topics:
Stepper Motors,
Smooth Drive,
VIDEOS,
Stepper Drivers,
Incremental Positioning
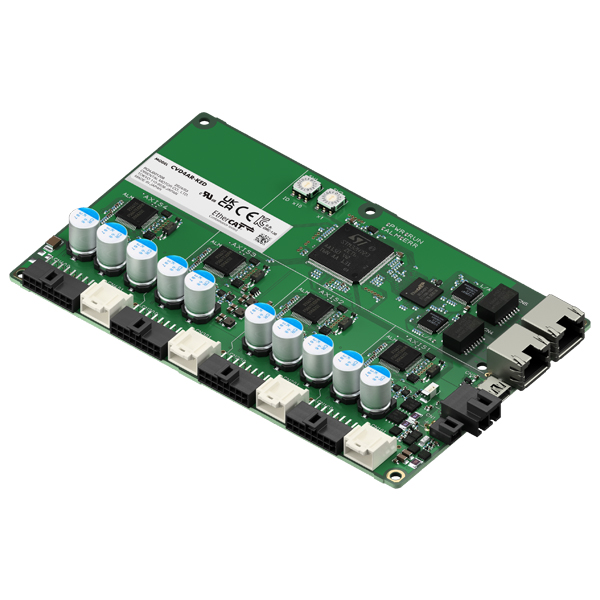
A network-compatible multi-axis driver can save space and reduce costs by combining multiple stepper motor drive circuits in a single product and minimizing the number of cables necessary for motion control.
Read More
Topics:
Stepper Motors,
VIDEOS,
Application Examples,
Product Introductions,
Semiconductors,
Stepper Drivers,
Incremental Positioning
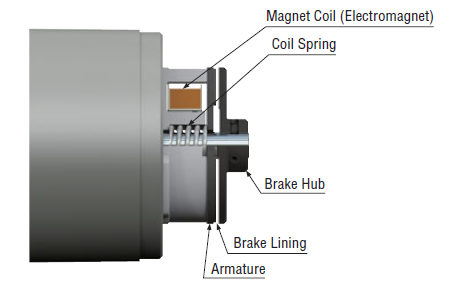
Motors with built-in electromagnetic brakes enhance safety by preventing unexpected movement during power failures, which is crucial for medical applications where precision, safety, and reliability are essential.
Read More
Topics:
AC Motors,
Stepper Motors,
Robotics,
Absolute Positioning,
Linear Actuators,
VIDEOS,
BLDC Motors,
Vertical Lifts,
Application Examples,
Service Life,
Medical,
Laboratory,
Incremental Positioning
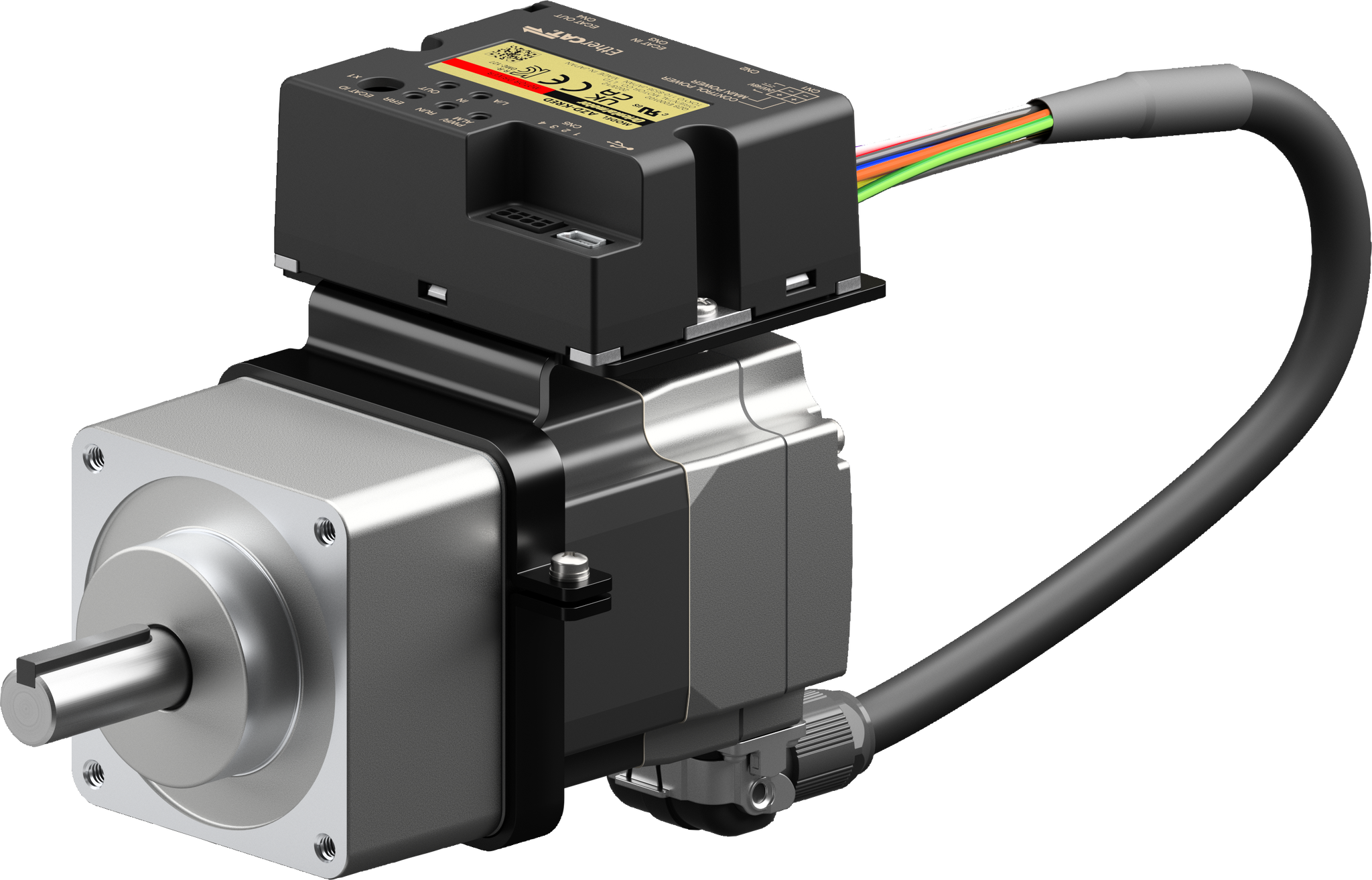
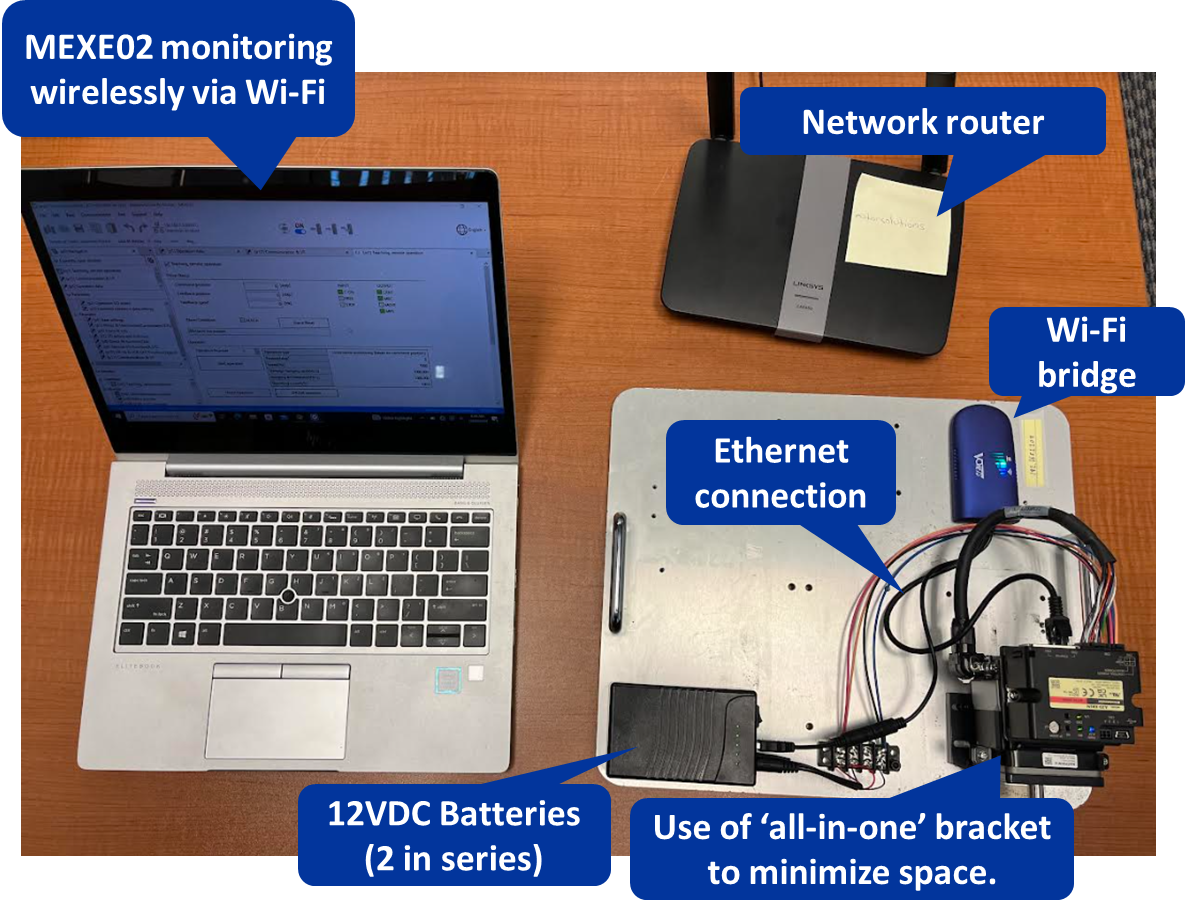
In the factories of the future, wireless motion control will offer unprecedented flexibility for mobile machines and space-constrained applications. This comprehensive guide walks engineers through implementing wireless motion control using Oriental Motor's AZ Series Ethernet Type mini Driver, eliminating cables while maintaining precise motion control.
Read More
Topics:
Stepper Motors,
Robotics,
Alphastep Hybrid Control,
VIDEOS,
Software,
Network,
Product Demos
Interested in industrial robots but not sure where to start? Learn how Oriental Motor's compact and easy-to-use small industrial robots, robot controllers, and software can help simplify robotic automation.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
VIDEOS,
Software,
Application Examples,
Product Introductions,
XYZ/Cartesian/Gantry