Selecting a gearhead for a stepper motor is like picking out the right shoes for the occasion. Sure, you can wear Air Jordans on a football field, but they're not better than a pair of regular cleats. Similarly, you can use a harmonic gearhead to drive a unidirectional conveyor, but you may be overpaying for its zero-backlash capability when you don't have to. Picking the right gearhead can ensure the best balance between performance and budget.
In this article, I'll cover the types of gearheads offered for stepper motors and how to select one.
Topics covered:
- Why Use a Gearhead?
- How Does a Gearhead Work?
- Stepper Motor Sizing Example - Ball Screw Drive
- About the αSTEP AZ Series
- Types of Gearheads Offered for Stepper Motors
- Summary
First, we'll dive into the reasons why gearheads are used.
|
 |
For other advantages of geared motors, please read this article: 10 Advantages of Gear Motors
|
Permissible Torque TG = TM × i × η
|
T.G. = Gearhead Permissible Torque T M = Motor torque i = Gearhead reduction ratio η = Gearhead transmission efficiency |
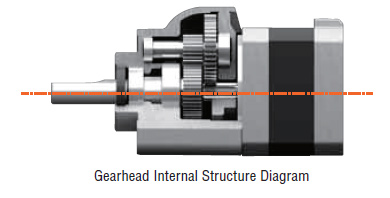
The gearhead output shaft speed is the motor output shaft speed divided by the gear ratio.
![]()
Typically, the combined specifications for the gearmotor are already listed by the manufacturer, so all you have to do is verify the numbers. However, if you purchased a motor and a gearhead from different manufacturers, then you'll have to do some calculations to determine the final output.
| FYI |
How is the gear ratio determined? |
|
Determining the proper gear ratio requires knowing the torque, load inertia, and speed requirements for the specific application, so motor sizing calculations must be done first. After performing motor sizing calculations, select a motor, a gearhead type, and then a gear ratio that satisfies the required total torque (acceleration torque + load torque), system load inertia, and speed range (RPM). Remember to add a safety factor. |
Here's an example of a typical motor sizing process; starting with the load torque calculation. The load inertia must be calculated before the acceleration torque is calculated. Speed range, axial load (thrust load), and radial load (overhung load) also need to be verified. The recommended motor must meet all requirements.
|
Stepper Motor Sizing Example - Ball Screw Drive
There are many formulas to calculate the required torque. The trick is knowing which one to apply. For a stepper motor driving a ball screw, here's the formula used to calculate the required load torque. First, figure out the "F" force (2), then plug it into the TL (load torque) formula (1).
Now, add up all load inertia values of objects driven by the motor to calculate the acceleration torque. Acceleration torque is used only during the acceleration or deceleration portions of the motion profile. When the acceleration/deceleration time is shorter, this value can be larger than the load torque. Make sure you add the acceleration torque to the load torque for the total required torque. A load inertia and a rotor inertia value are necessary for calculating acceleration torque.
 Once completed, determine your total required torque by adding your required acceleration torque to your required load torque and then adding an adequate safety factor. Make sure the total required torque is under the permissible torque specification of the motor + gearhead. Also, confirm if the required RPM is within the specifications of the motor + gearhead.
|





Types of Gearheads Offered for Stepper Motors
Stepper motors can be equipped with various types of gearheads, from spur to planetary to harmonic, allowing them to meet different torque, speed, or load inertia ratio requirements. Oriental Motor offers stepper motors in 3 product series:
| Gearhead Types | Parallel Shaft | Right-Angle Shaft | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| SH (Spur gear mechanism) |
CS (Spur gear mechanism) |
TH (Spur gear mechanism) |
TS (Spur gear mechanism) |
PS (Planetary gear mechanism) |
PN (Planetary gear mechanism) |
HPG (Harmonic Planetary® |
Harmonic (Harmonic Drive ® |
FC (Face gear mechanism) |
|||
| External View |  |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
| Features | |||||||||||
| Accuracy | For 2-phase | Low Backlash | Non-Backlash | Low Backlash | |||||||
| ★ | ★ | ★★ | ★★ | ★★ | ★★★ | ★★★ | ★★★ | ★★ | |||
| High Torque | ★ | ★★ | ★ | ★★ | ★★ | ★★ | ★★ | ★★ | ★★ | ||
| Maximum Instantaneous Torque Available | - | - | - | ○ | ○ | ○ | ○ | ○ | - | ||
| Load Face Mounting | - | - | - | - | - | - | - | ○ | ○ | - | |
| Center shaft | - | ○ | - | - | ○ | ○ | ○ | - | ○ | ○ | |
| Main Specifications | |||||||||||
| Types of Gear Ratios | 3.6, 7.2, 9, 10, 18, 36 | 5, 10, 15, 20 | 3.6, 7.2, 10, 20, 30 | 3.6, 7.2, 10, 20, 30 | 5, 7.2, 10, 25, 36, 50 | 5, 7.2, 10, 25, 36, 50 | 5, 15 | 50, 100 | 7.2, 10, 20, 30 | ||
| Speed Range [r/min] | ~833 | ~600 | ~500 | ~833 | ~600 | ~600 | ~900 | ~70 | ~416 | ||
| Permissible Torque [N·m] | ~4 | ~4.5 | ~4 | ~6 | ~8 | ~8 | ~9 | ~10 | ~10.5 | ||
| Maximum Instantaneous Torque [N·m] | - | - | - | ~10 | ~20 | ~20 | ~19 | ~36 | - | ||
| Backlash [arcmin] | 45~70 | 45~70 | 10~35 | 10~35 | 7~9 | 2~3 | 3 | 0 | 10~15 | ||
| Gearhead Types | SH | CS | TH | TS | PS | PN | HPG | Harmonic | FC | ||
*The values in the main specifications are based on a frame size of 60 mm.
*Harmonic Planetary®, Harmonic Drive®, and HD" are registered trademarks or trademarks of Harmonic Drive Systems Inc.
Refer to the technical reference for more information about the principle and structure of each type.
Here's more information about each type of gearhead and their compatibility list. We split the lineup into 2 categories: Oriental Motor gearheads or 3rd party.
| [SH Type] Spur Gear (Offset Shaft) | 10,000 hours rated life |
 |
The spur gear type is the most common type of gearhead. They are characterized by their straight gear teeth mounted on a parallel shaft and offers efficient transmission of torque. Spur gears are widely used due to their simplicity, cost-effectiveness, and torque transfer ability.
Availability: PKP Series 2-Phase Frame sizes: 28, 42, and 56.4 mm |
| [TS Type] Spur Gear (Offset Shaft) | 10,000 hours rated life |
|
|
A TS type gearhead is an updated version of the TH type gearhead and contains spur gears that are manufactured with high precision. The output shaft gear undergoes high precision finishing after heat treatment to eliminate the impact of dimensional change caused by heat. This allows TS gears to have a simple structure with low backlash that does not require any special adjustment mechanism, such as tapered gears. The TS type gearhead offers higher permissible torque, maximum torque, and maximum RPM than other spur gearheads as well as ther older taper-hobbed gear type.
Availability: AZ Series, RK II Series, PKP Series 5-Phase Frame sizes: 42, 60, and 90 mm |
| [CS Type] Spur Gear (Center Shaft) | 10,000 hours rated life |
|
|
The CS type gearhead is a unique spur gearhead where the output shaft is centered instead of offset. The design adds a protrusion on the gearhead case in order to place the final stage gear and output shaft on the same axis as the pinion shaft. With the extra space, bigger gears and bearings can be used to transmit more torque and handle more load. The CS type gearhead has approximately double the torque, as well as 2.6 times the axial load and 4 times the radial load when compared to other spur gearheads, such as the SH type.
Availability: PKP Series 2-Phase Frame sizes: 28, 42, and 60 mm |
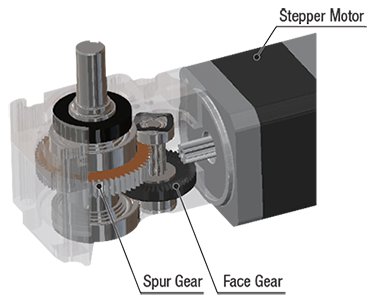
| [FC Type] Right-Angle Spur Gear (Center Shaft) | 5,000 hours rated life |
|
|
An FC type gearhead is a compact right-angle gearhead made up of a high strength disc-shaped gear (face gear) meshing with a traditional spur gear. With the FC type, high precision, high strength and space savings are possible with lower backlash than other spur gears. This is a unique gear motor that can minimize footprint for conveyors or robotics by reducing the motor overhang length. The FC type gear motors are offered in either "Up" or "Down" versions to indicate the cable location.
Availability: AZ Series, RKII Series Frame sizes: 42, and 60 mm |
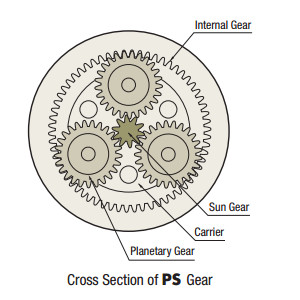
| [PS Type] Planetary Gear (Center Shaft) | 20,000 hours rated life |
|
|
A PS type gearhead's structure primarily consists of a sun gear in the center, planetary gears around it, and an internal tooth gear on the outside. As the sun gear rotates, the planetary gears rotate around it. The movement of the planetary gears determine the rotation of the output shaft via the carrier.
Availability: AZ Series, RKII Series Frame sizes: 28, 42, 60, and 90 mm |





3rd Party Low or Non-Backlash Gearheads: Neugart, Harmonic Drive Gearheads / Gear Motors:
| [PLE Type] Planetary Gear (Center Shaft) | 30,000 hours rated life |
|
|
The PLE Series gearhead employs an efficient planetary gear mechanism and is composed of fully hardened gears. Sun gear and planetary gears are honed (precision final machining after heat treatment). This technology guarantees extremely high torque density, long life, and low backlash. Different than our other pre-assembled gear motors, the PLE type gearhead and motor are shipped separately and must be assembled using the included gasket and screws.
Availability: AZ Series, RKII Series, PKP Series 2-Phase Frame sizes: 42, 60, and 90 mm |
| [HPG Type] Harmonic Planetary (Center Shaft) | 20,000 hours rated life |
|
|
The HPG planetary/harmonic gearhead is a hybrid version that combines technologies of the planetary and harmonic gears. It applies the thin elastic gear from harmonic gear technology to the internal gear of the planetary gearhead to achieve low backlash. Shaft or flange types are available. The HPG gear features high positioning accuracy, high permissible torque, and high maximum instantaneous torque. The HPG Gears are available with a center shaft or surface mount to meet the needs of various applications.
Availability: AZ Series, RKII Series Frame sizes: 42, 60, and 90 mm |
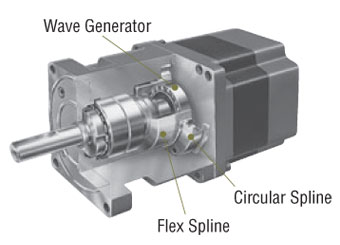
| [HS Type] Harmonic Gear (Center Shaft) | 10,000 hours rated life |
|
|
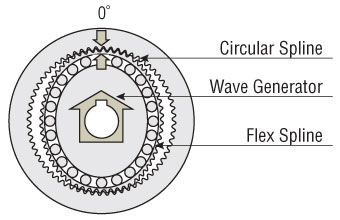
The HS type gearhead is a high-torque version of the HPG gearhead with no backlash. This is a true harmonic gearhead that uses a circular spline, wave generator, and flex spline. With a large number of teeth that mesh at the same time in the flex spline, the effects of tooth pitch error and cumulative pitch error on rotational accuracy are averaged out, resulting in high positioning accuracy. High gear ratios are available for high torque generation. Due to its high accuracy, non-backlash, and high-performance gear design, the mechanical life, permissible torque, and maximum torque are vastly improved. The rate life has been increased from 5,000 hours (conventional model) to 10,000 hours, except for the 1.65" (42 mm) frame size.
Availability: AZ Series, RKII Series Frame sizes: 30, 42, 60, and 90 mm |






| FYI | When to use planetary or harmonic gearheads? |
| For high precision motion control applications where the motor is operating in both CW and CCW directions, gear backlash can cause missed steps. If backlash is a problem for the application, make sure to choose either a harmonic gearhead (no backlash) or a planetary gearhead (very low backlash). |
If you're wondering about the differences between the AZ Series, RK II Series, and PKP Series...
|
PKP Series (Motor Only)
|
The PKP Series includes both 2-phase and 5-phase stepper motors. While 2-phase is most common, 5-phase can offer higher resolution and lower vibrations. Many motor types are available from encoder type to electromagnetic brake type. Use with CVD pulse input or stored data drivers for the best performance. |
|
RK II Series (Motor + Driver) |
The RK II Series combines smooth-running, high-efficiency "E" type 5-phase stepper motors with dedicated AC input drivers for optimal performance. No external DC power supply is necessary. Pulse input and stored data type drivers are included. |
|
AZ Series (Motor + Driver) |
The AZ Series is part of the αSTEP AZ Series Hybrid Step-Servo product family, which also includes rotary actuators, linear actuators, and grippers. This series consists of a closed-loop stepper motor and a universal driver system that combines the simplicity of open-loop stepper motors with the intelligence of servo systems. Equipped with a self-correcting hybrid control algorithm, low-loss laminations, and a battery-free, multi-turn mechanical absolute encoder, the AZ Series is as reliable as it gets. |




Summary
The article discusses the importance of selecting the right gearhead for stepper motors used in high-precision motion control applications. It explains how gearheads work and covers various types of gearheads available.
Selecting the appropriate gear type and gear ratio is crucial for maximizing stepper motor performance for the intended application. The right choice depends on factors such as:
- Required torque and speed (the basics)
- Precision needs (ie: backlash considerations)
- Space constraints (ie: parallel shaft or right-angle)
- Load characteristics (ie: inertia, axial, and radial loads)
- Environmental conditions (ie: IP rating requirements)
- Budget constraints (ie: features vs cost)
Sometimes, you can't have everything you want, so it's important to separate the must-haves from the nice-to-haves that might not be necessary for the application.
Too busy to figure out which gearhead to use, or what gear ratio to select? Our team is ready to help you size the perfect motor.


