STO, or "Safe Torque Off", is a dedicated, built-in safety circuit function that makes safety easier to manage for motion devices, such as an industrial robot. It is part of the overall safety system designed to prevent injuries or damage.
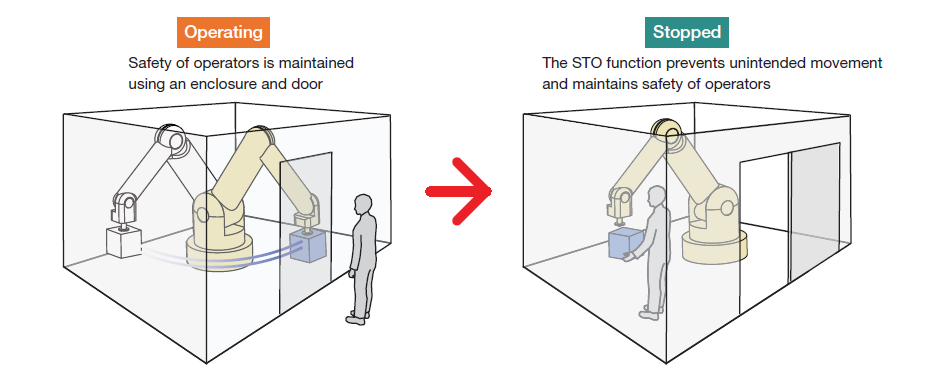
First introduced with servo motor drivers, an STO circuit is a dedicated function of the driver that prevents unintended motor motion. This is useful in preventing injuries to operators working near a robot or a machine. A driver with a built-in STO function can reduce peripheral equipment, simplify wiring, and save space while preventing errors and injuries.
Benefits of a Built-in STO Function:
- Reduce peripheral equipment
- Simplifies wiring
- Saves space
In recent years, the STO function has also been adopted by stepper motor drivers as well as variable frequency drives for 3-phase AC motors. Oriental Motor's AZ series AC-input stepper motor drivers now offer this certified safety function to make safety easier. The AZ series STO function meets the requirements of IEC 61800-5-2 and IEC 60204-1 (Stop Category 0).
How Does STO Work?
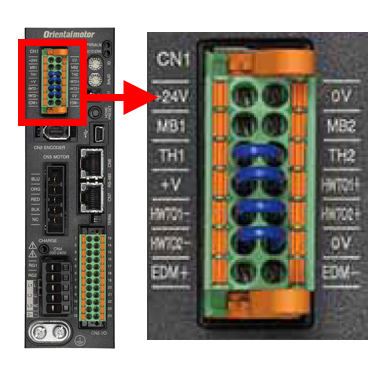
Look at the above CN1 connector terminal and where the bottom two blue jumper wires are. These terminals are labelled HWTO1+, HWTO1-, HWTO2+, and HWTO2-. These two inputs are redundant, normally-closed safety inputs; meaning STO related alarms will trigger if either input is disconnected or open. The purpose of the blue jumper wires is to prevent STO-related arms when the driver is powered up the first time if nothing is connected to those terminals.
Most of our I/O are dry contacts; meaning an external power supply is necessary to power the circuit. When the application requires the STO safety function, these blue jumper wires would be replaced with actual devices, and HWTO inputs would be connected to an external normally closed safety circuit. For this reason, they are dry contacts by definition. However, when the jumper wires are installed and the driver is powered on, these contacts are technically considered wet contacts since they use an internal 24VDC power supply to power the circuit.
If an open circuit is detected in the safety circuit during operation, the system will forcibly remove power from the motors by disabling the inverter's power transistors (IGBTs). This prevents unintended motion in the quickest and safest way possible.
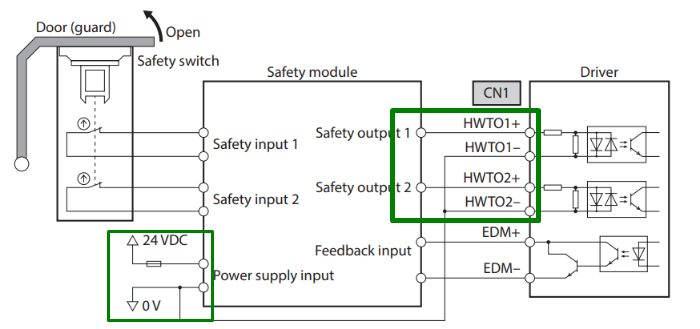
Please see below for the wiring diagram for an STO circuit involving a door, a safety module, and a driver.
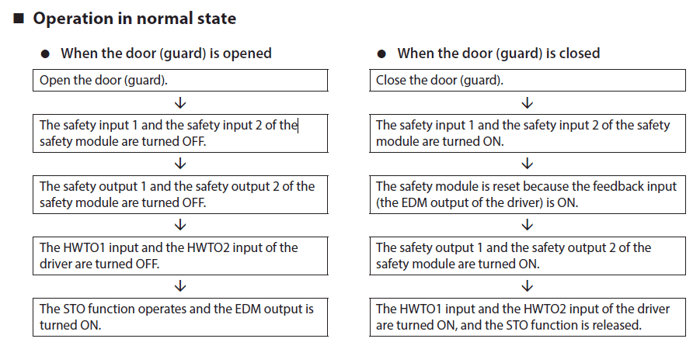
In the table below, we show how the external safety system works with our HWTO inputs in the same door application.
Is STO Really Necessary?
When designing an equipment, the manufacturer (OEM) needs to run a risk assessment in order to state the level of safety for the equipment. If the existing design does not meet a safety standard, additional protective devices must be added. A safety system can include multiple motor drivers and other devices connected to the circuit, such as switches or buttons.
There is no absolute, guaranteed safety for robots or machinery. Every machine will eventually fail, and human beings are not perfect all the time. Design engineers need to implement a safety system that can guarantee an acceptable probability of unintended motor motion when stopped. This chance, or frequency of occurrence, is defined by the safety integrity level, or safety index. This will be covered later in this post.
How Does STO Help Eliminate Components?
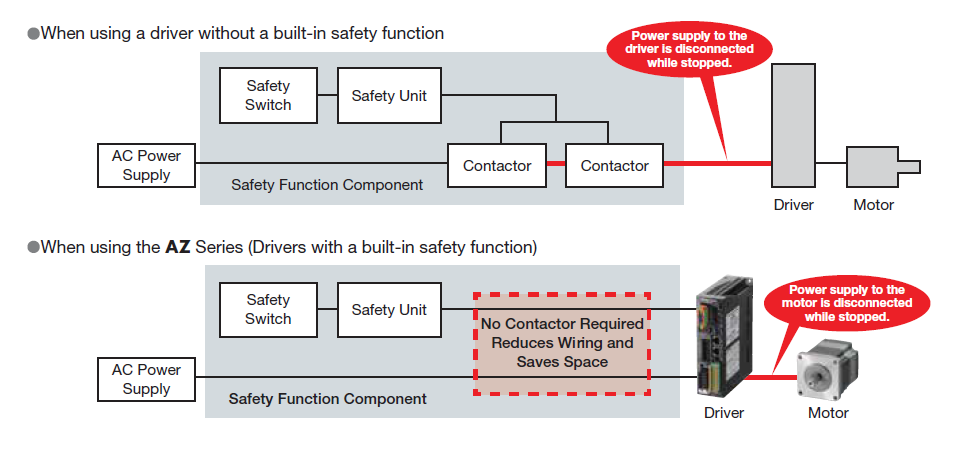
When a driver without a built-in STO safety function is used, additional contactors are necessary to cut off power to the driver and motor. When an AZ series driver with a built-in STO safety function is used, no contactors are required, and the power to the motor is cut off directly. By using an AZ series driver, wiring can be reduced and space is saved.
The STO safety circuit function is designed to be used after the motors are already in a stopped state. It is not intended to be used as an E-STOP (Emergency Stop) during normal operation. To connect safety-related equipment for additional measures, use the EDM output (from the STO circuit).
| TIP : is it better to use STO vs dedicated inputs such as C-OFF and FREE to turn off motor current? |
| Yes. The STO circuit essentially bypasses the contactors and disconnects the motor from its power directly. This effectively removes any chance of the motor unintentionally starting while it's stopped. The C-OFF and FREE inputs do offer the same function in turning the motor current off, but the difference is how fast they can do it. The STO circuit skips the I/O circuits and cuts off power to the motor directly, so it's considered faster and safer. Remember, the goal is to prevent unexpected movement as quickly as possible. |
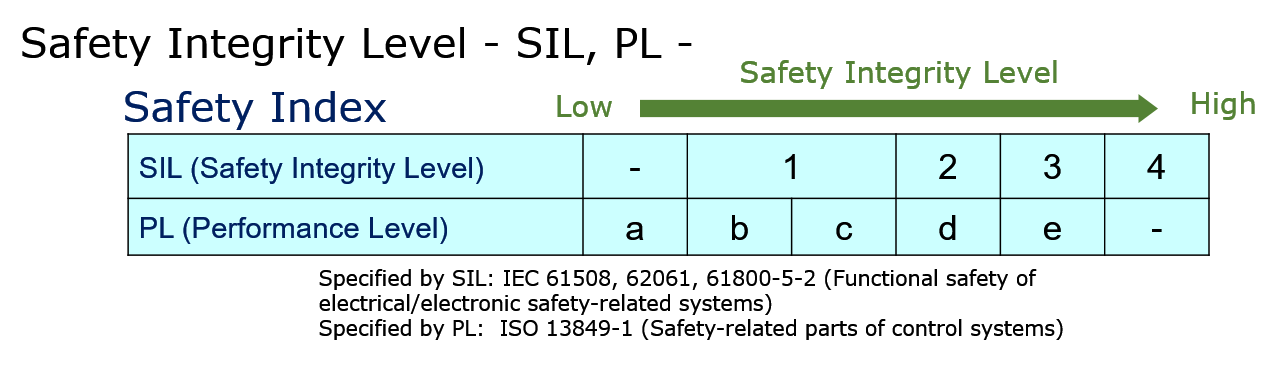
Safety Index
To aid the OEMs in their product selection, device manufacturers may provide a "functional safety" specification based on the following regulatory standards. The umbrella standard, or the main standard, is the IEC 61508, then there are more specific sub-standards. The machine standard specified by IEC, IEC 62061, is designated for SIL. The machine standard specified by ISO, ISO 13849, is designated for PL. SIL and PL are categorized safety standards as specified by either IEC or ISO.
For SIL (Safety Integrity Level) and PL (Performance Level), the range of these safety ratings overlap a little, but they are pretty similar. For example, a safety system rated for SIL 2 is the same as PL d.
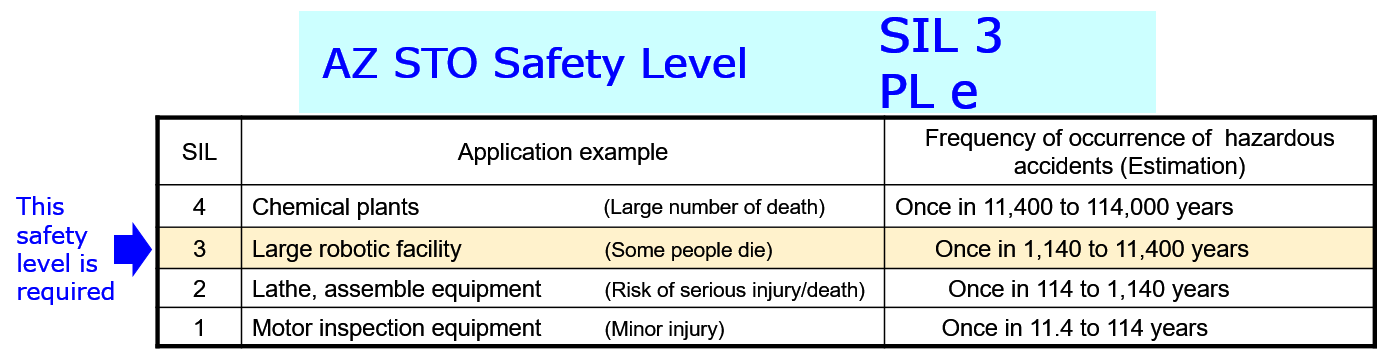
The safety level of the equipment is determined by the designer. For example, for a large robotic facility, a large robot can potentially kill if it moves unexpectedly while an operator is working near it. Think of the centrifuge that astronauts use to train themselves with G forces at NASA. Imagine if someone was servicing a part of the machine, and it unexpectedly starts.
For large robots, a SIL 3 or PL e safety rated product would be best. A motor driver that's rated for SIL 3 or PL e may have one failure event happen in 1,140 to 11,400 years (estimated).
Emergency Stop Category
Stop categories are also defined by regulatory standards. In this case, they're defined in IEC 60204-1. Stop Category 0 equates to pulling the plug to the motor. Stop Category 1 brings motors to a controlled stop, then pull the plug. Stop Category 2 brings motors to a controlled stop and then keep power on.
- Stop Category 0 - stopped by an uncontrolled stop and immediate removal of power
- Stop Category 1 - stopped by a controlled stop with power, then remove power when stopped
- Stop Category 2 - stopped by a controlled stop with power, then leave the power on
The STO function from the AZ series drivers is directly related to Stop Category 0 as defined by IEC 60204-1. Under Stop Category 0, a motor is stopped by forced and immediate removal of power to the machine actuators, such as an uncontrolled stop (no deceleration).
Other similar acronyms for similar safety functions are SS1 (Safe Stop 1), SS2 (Safe Stop 2), SOS (Safe Operation Stop), SSE (Safe Stop Emergency), and SBC (Safe Brake Control). Out of these, only STO is rated for Stop Category 0, SS1 is rated for Stop Category 1, and SS2 is rated for Stop Category 2.
Safety Standards and Applicable Products
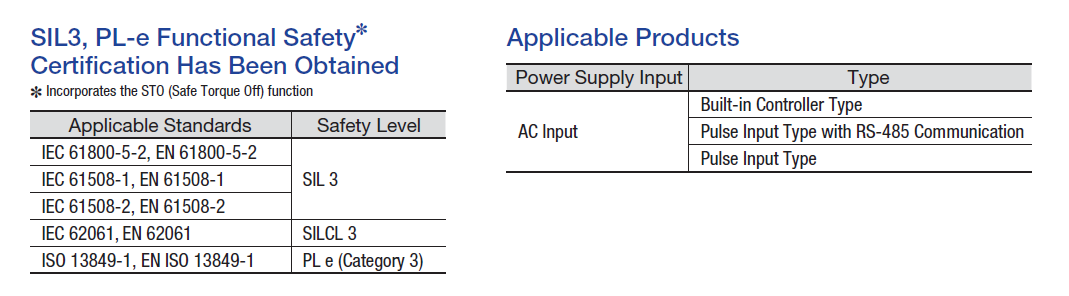
The applicable standards for the STO circuit are IEC 61800-5-2, EN 61800-5-2, IEC 61508-1, EN 61508-1, IEC 61508-2, EN61508-2, IEC 62061, EN 62061, ISO 13849-1, and EN/ISO 13849-1. The STO function of the AZ series driver is rated for SIL 3 and PL e (Category 3).
The STO circuit is a built-in function of AZ series drivers including built-in controller type, pulse input type with RS-485 communication, and pulse input type.
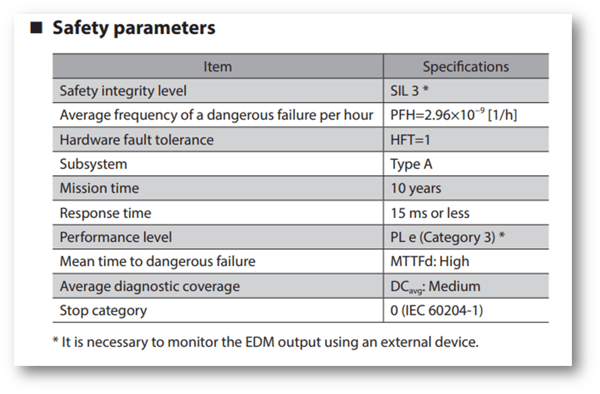
Here are the safety parameters for the AZ series drivers with built-in STO circuit function. The average frequency of a dangerous failure per hour (PFH = 2.96x10^-9). The safety integrity level is SIL 3. The performance level is PL e, and the stop category is 0. This is better than some other STO functions offered in the industry.
| The STO circuit function should not be used for an emergency stop to stop the motors. It is designed to be used after motion have ceased completely for machine maintenance. Once this happens, activating the STO circuit would ensure that power is cut off from the motor thus keeping operators safe while they service a robot or machine. If an emergency stop is necessary, please wire a button as part of the external safety equipment. |  |
The AZ series AC input drivers and DC input drivers with built-in STO circuit function are certified by TÜV SÜD Product Service GmbH and can be used with any AZ Series Hybrid Step-Servo stepper motors, linear actuators, and rotary actuators. Once the motor or actuator is connected, the driver automatically adjusts its internal settings to match the motor (or actuator). If there are concerns that regenerative voltage could damage the driver, add the RGB100 regeneration resistor accessory.
For additional info about the STO function, please refer to the AZ series "functions" manual, or contact us for details.

Thank you for reading. Please subscribe to receive new posts.


