In this article, we're diving deeper into two stepper motor types: high-resolution type and encoder type; and how they can be used to improve precision in critical laboratory automation applications like autosamplers.
|
Jump to sections: |
What is an autosampler?

Credit: Wikipedia
An autosampler is an automated machine that moves samples to an analytical instrument for analysis. Autosamplers are typically used in laboratory automation and can automate the testing of a large lot of samples. It can collect samples periodically from a large sample source and bring them to a sampling station, or bring a sampling instrument to the sample on a carousel. An application example would be testing blood samples of patients for viral diseases.
Since positioning precision and accuracy are necessary to move samples to specific locations repetitively, servo motors and stepper motors are typically used. A stepper motor's precise control and positioning accuracy are beneficial for motion axes such as sample injection and syringe movement. For more demanding applications with higher throughput requirements, such as robotic arms, a servo motor can provide higher torque and higher speeds. Regardless of which motor is chosen, these motors are often coupled with mechanisms to convert rotary motion into linear motion, such as belt and pulley, ball screw, or rack and pinion systems. For this article, we will focus on stepper motors.
Examples of Autosamplers
|
|
An autosampler for solid samples for gamma ray measurement |
|
Credit: Wikipedia |
Credit: Wikipedia |
An autosampler requires positioning precision; so the motors need to offer the same characteristics.
A 2-phase hybrid stepper motor typically "steps" at 1.8° and can achieve ±0.05° (±3 arc min) stop accuracy while running in open-loop. By improving the positioning precision of the motor, the performance of the machine can be also improved.
How do you improve the positioning precision of stepper motors?
You can improve positioning precision by increasing the motor resolution or by adding an encoder (or both). In this article, we will focus on two types of stepper motors that can help: high resolution type and encoder type.
|
Option 1
|
Use a high resolution type stepper motor to increase resolution and accuracy. |

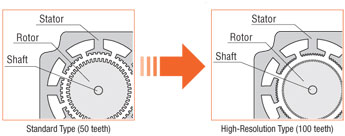
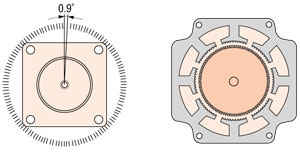
By switching out a standard 2-phase stepper motor with a high resolution type 2-phase stepper motor, the resolution of the motor is doubled due to the tooth pitch being reduced from 7.2° to 3.6° (360° divided by 50 or 100 teeth). Since we fully step at a 1/4 of the tooth pitch at a time, this means that you can step at 0.9° instead of 1.8°. With finer resolution, the precision of movement is also improved.
|
In a high resolution type stepper motor, the number of rotor teeth has doubled to 100 compared to 50 with the standard type. As a result, the tooth pitch is reduced by half, and the basic step angle becomes 0.9°. |
 |
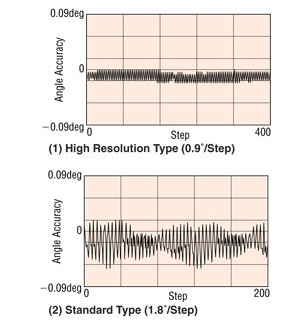 |
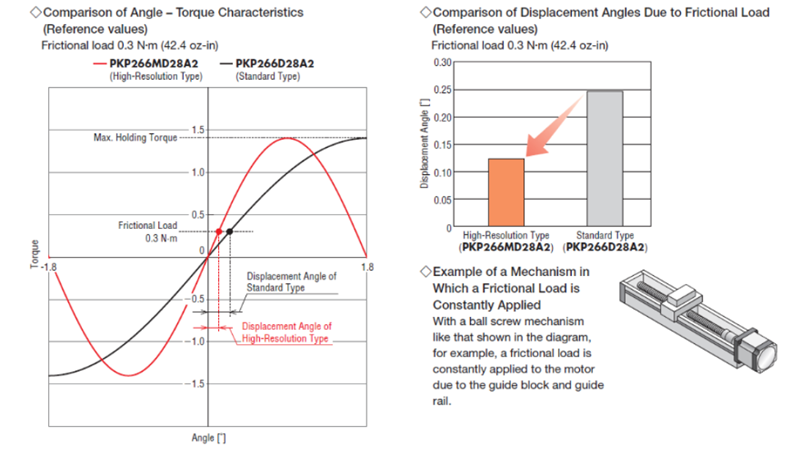
The high resolution type increases motor resolution from 200 steps/revolution to 400 steps/revolution. Smaller step angles can be achieved by half-step or microstep driving. However, these methods do not increase accuracy. Better angle-torque characteristics improve the stop accuracy of the stepper motor by minimizing the negative effect of the frictional load, such as in a ball screw application. |
|
Option 2
|
Use an encoder type stepper motor for reliability. |

Although a standard hybrid stepper motor will not miss steps if sized properly for the load and speed, designers of automated machines or robots these days require more reliability these days. Most designers are now closing the loop to ensure that the motor does not miss steps during operation. Eliminating missed steps immediately for stepper motors is important since it will affect any subsequent motion (and other processes) after the missed steps have occurred.
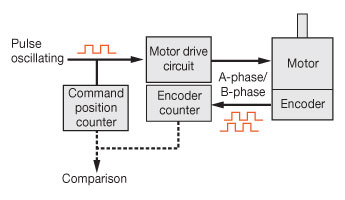
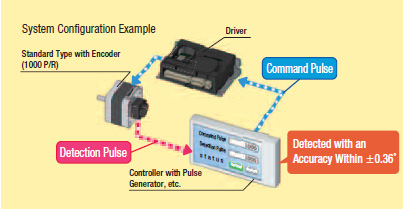
| By adding an encoder to a stepper motor's rear shaft and closing the feedback loop to the controller, a motor's travel distance can be monitored and verified by comparing the # of commanded steps to the number of pulses from the encoder, and missed steps can be programmed to be auto-corrected quickly to avoid delays. | 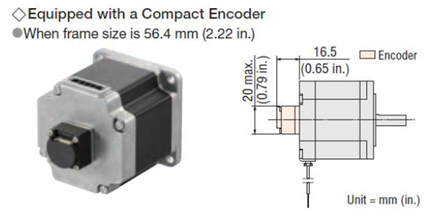 |
 |
 |
Many types of encoders are available can can be preassembled by Oriental Motor. For our PKP Series, compact incremental encoders of different resolutions, number of channels, output types, and electrical specifications are available for maximum flexibility with host controllers or PLCs. For better noise immunity for longer distances, use a line driver output type encoder.
Encoder Specifications
|
Encoder Code |
R2E |
R2F |
R3J |
R2EL |
R2FL |
R3JL |
|
|
Type |
Incremental |
||||||
|
Resolution |
200 P/R |
400 P/R |
1000 P/R |
200 P/R |
400 P/R |
1000 P/R |
|
|
Output |
A-phase, B-phase, Z-phase (3ch) |
||||||
|
Input Current |
45 mA or less |
30 mA or less |
|||||
|
Input Voltage |
5 VDC ±10% |
||||||
|
Output Type |
Voltage (TTL equivalent) |
Line Driver |
|||||
|
Output Voltage |
Low |
0.5 VDC or less |
|||||
|
High |
4.3 VDC or more (with no load) |
2.5 VDC or more |
|||||
|
Response Frequency |
100 kHz |
200 kHz |
|||||
|
Oriental Motor's PKP Series stepper motors are known for quality and include both a high resolution type and encoder types.
Watch another video to learn more about the PKP Series stepper motors, including its high torque design and other types.
The PKP Series offers 2-phase bipolar type (4 wire), 2-phase unipolar type (6 wire), and 5-phase bipolar type (5 wire) to connect to your preferred driver. Use a 5-phase motor for applications requiring lower vibration or noise.
|



As always, please contact our knowledgeable technical support team for support of our products.


