Robotic grippers are typically used to grip parts for transport. The driving force behind a gripper can be pneumatic, hydraulic, or electric. Which type is best for gripping?
The answer depends on the application requirements and the size of the load. While the high power from hydraulic and the cost-effectiveness from pneumatics may be appealing to some, electric motors should be considered for their consistency, efficiency, easy maintenance, and built-in driver functions.
In this post, we will explain how a torque limit function makes brushless motors a highly viable solution for grippers.
CHALLENGE: Gradually increase gripping force to securely grip load
 |
Conventional Gripper Equipped with a pneumatic device on the gripper, it grips the load and transports it to the next process.
Problems with Pneumatic Grippers While transporting a heavy load of a certain mass, the gripper may drop the load due to inconsistent gripping force. |
SOLUTION: Use the Torque Limit function to gradually increase gripping force
The Torque Limit function can be used to decrease or increase the torque of a motor incrementally by a percentage of the motor's rated torque. It is available on a number of Oriental Motor's closed-loop motor systems.
 |
Practical Application Example The Torque Limit function delivers optimized multi-level gripping force to gradually increase gripping force of a gripper and securely grip a load without damaging the load. How It Works Torque of a motor can be increase or decreased by the amount of current flowing through its windings. The Torque Limit function monitors and controls motor current in order to limit torque. |
|
How To Use
|
Timing Chart - Torque Limit Function 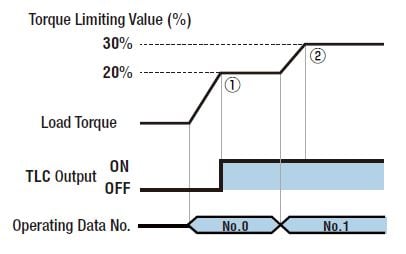 |
|
With 16 different speed and torque limit settings, the same BLE2 Series brushless motor and driver can be configured for various loads. * *With closed-loop stepper motor systems, up to 256 settings are offered. |
|

| Output Power | 30 W, 60 W, 120 W, 200 W, 400 W |
| Torque Limit Setting Range*1 | 0~300% |
| Max Number of Settings | 16 |
| Torque Limit Accuracy*2 | ±10% |
| Speed Control Range*3 | 80~4000 r/min |
*1: The value when the rated torque value is 100%.
*2: An error up to a max. of approximately ±10% (at rated torque and rated speed) may occur between the setting value and generated torque due to the setting speed, power supply voltage
and motor cable extension length.
*3: The BXⅡ Series with a speed control range of 2~4000 r/min is also available.
Here's a demo video that introduces BLE2 Series brushless motor and driver, the Alarm Monitor function, and the Torque Limit function.
Need help with an application?



