The BLV Series is one of two DC-input brushless motor speed control systems we offer. While a brushless motor with hall-effect sensor feedback provides constant torque, wide speed range, and speed regulation, the BLV driver offers unique functions designed for mobile robots, such as low battery operation and ramp operation.
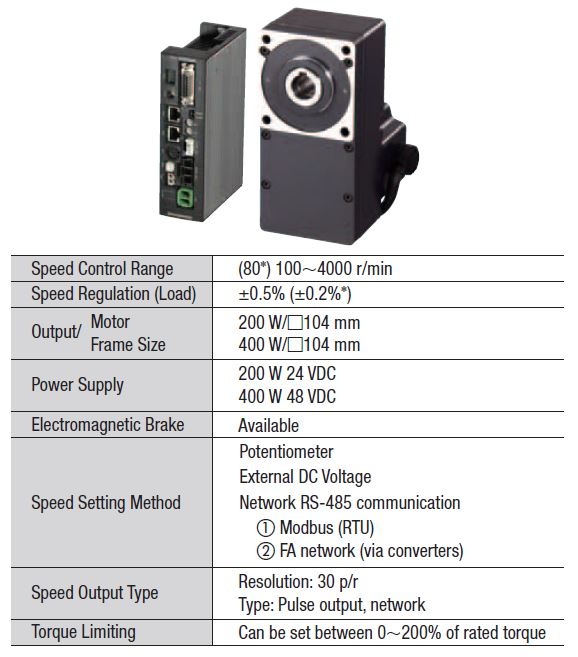
An image of the BLV Series brushless gear motor and driver is shown below. On the right, we show a BLV gear motor with a pre-assembled FR gearhead, which is a space-saving flat style hollow shaft gearhead that is designed for high torque applications. The dedicated motor driver on the left controls the motor speed and operation. The terminal side is shown, where all the wires are connected. Optional parallel shaft gearheads or electromagnetic brake can be equipped.
Here's the original BLV Series 200 W / 400 W lineup and some of its specifications.
| 1. New 100 W Type |
| 100 W Parallel Shaft Gear Motor | 100 W FR Flat Hollow Shaft Gear Motor |
 |
|
While listening to feedback from our customers, we realized that compact 100 W gear motors are highly demanded in the AGV/AMR/mobile robot and material handling industries. Therefore we expanded the BLV Series and its AGV-specific functions into the 100 W range. A new 100 W type was added to the lineup. Although the look remains the same, specifications are slightly different.
Differences
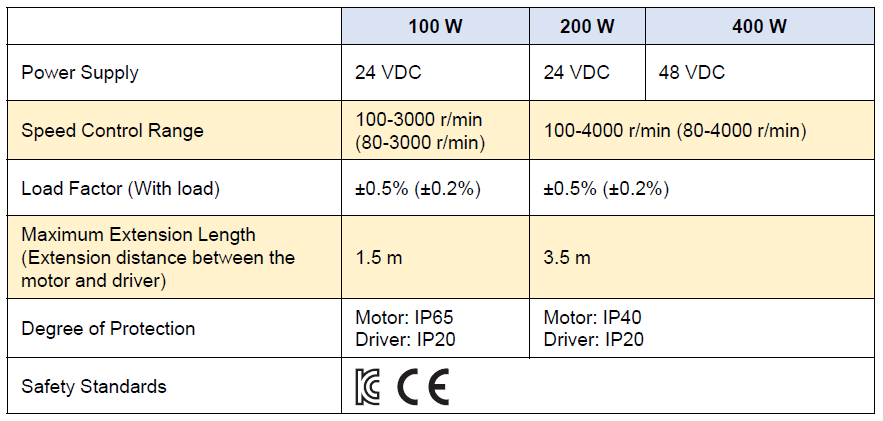
- The 100 W models accept only 24 VDC, so 48 VDC will not be accepted.
- The speed range is narrower at 10~3000 r/min (analog) or 80~3000 r/min (digital).
- The maximum extension distance between the motor and driver decreased to 1.5 meters.
- The IP rating for the motor increased from IP40 to IP65.
Similarities
- The speed regulation stays the same at +/-0.5% (analog) or +/-0.2% (digital).
- The driver's IP rating stays at IP20.
- The safety standards stay the same.
Here is a comparison chart for the 100 W, 200 W, and 400 W BLV Series models.
Two cable lengths are available at 0.2 m (0.7 ft) or 1.0 m (3.3 ft). However, a round-shat, ungeared version is not available for the 100 W type.
Here's what the overall system configuration looks like. Accessories like mounting brackets, couplings, and external speed potentiometers are also available.
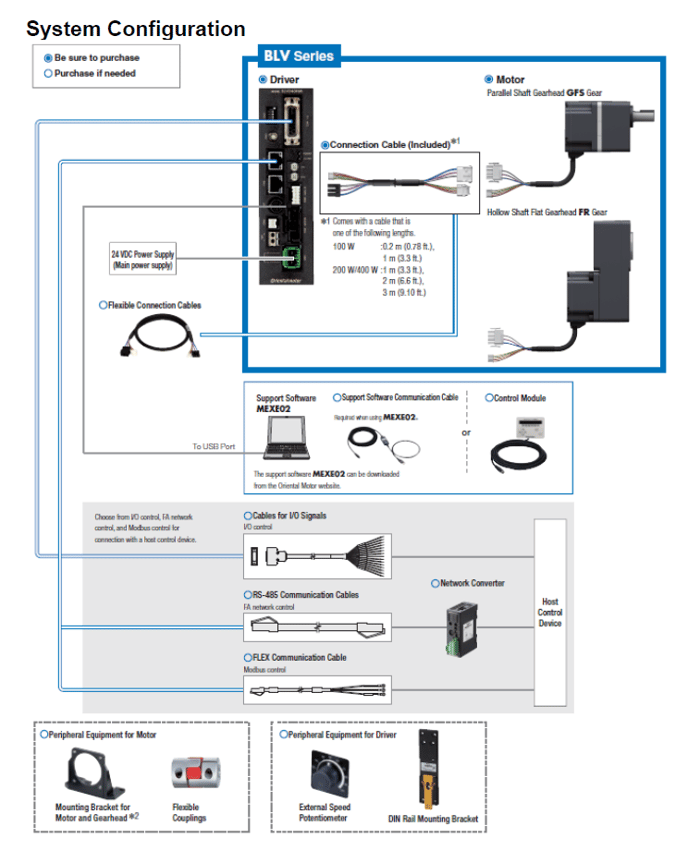
Notice that besides the OPX-2A "Control Module" in the above image, MEXE02 support software also shows up as a new method to program the stored data on the driver. Next, we'll go over the second major design change on the BLV Series.
| 2. Compatibility with MEXE02 Support Software |
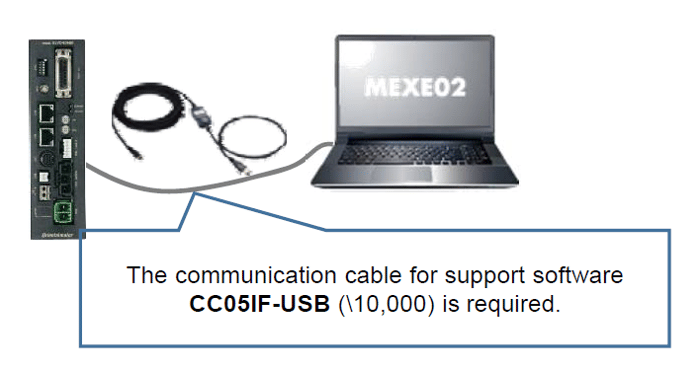
Easy Data Setting with MEXE02 Support Software
The MEXE02 software offers both an intuitive UI, simple point-to-point motion profile programming, and monitor functions. The stored data on the original BLV driver could be programmed with either the OPX-2A hand-held teaching pendant, or via Modbus RTU through RS-485. Now, all drivers from all wattages can use the universal MEXE02 support software for ever easier data setup.
The screenshot below shows the MEXE02 software when an updated BLV driver is connected to a PC. The rotation speed [r/min], torque limiting value [%], acceleration time [s] and deceleration time [s] are required. You just enter the values you want, or use default values. 8 speed profiles are available with the BLV Series. The number of profiles correspond to the product. For example, 256 motion profiles are available with the AZ Series stepper motor drivers.
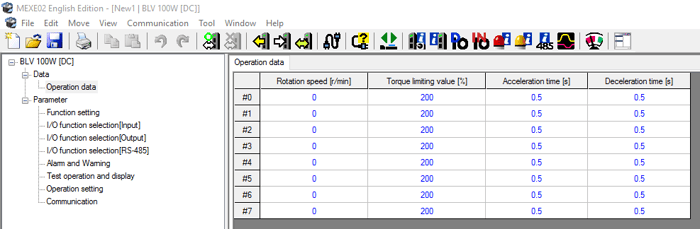
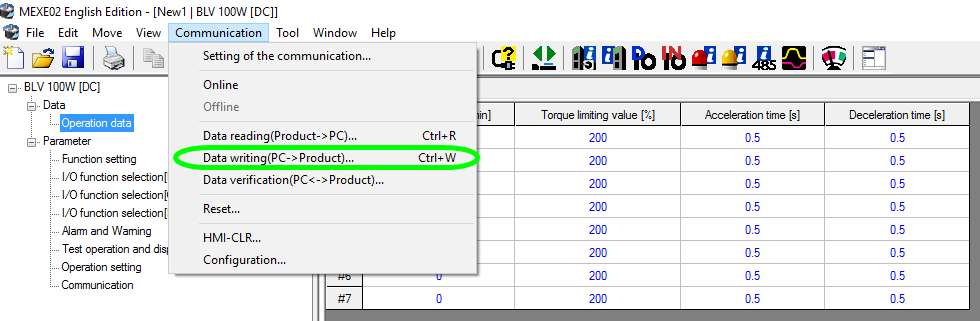
Don't forget to save your data by performing a data write operation.
Besides the easy, intuitive programming, the MEXE02 software's operation teaching, monitoring, and testing functions are very useful during setup or troubleshooting. Let's go over these functions.
Teaching, Remote Operation
The teaching operation window allows the operator to manually move the motor to a specific position, so that the position can be taught and stored to the driver. You can use the arrow keys to move the motor, and select the data number to save the data to. Remote operation allows you to test the motion profiles stored in the driver without having to wire the I/O.
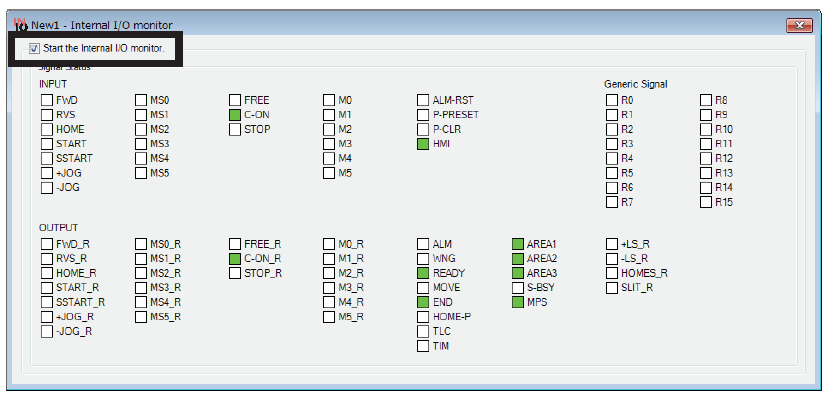
The two screenshots below have no product connected, so the monitored values show 0. When the system is operating, there will be values changing in real-time. Under OUTPUT, green indicates that the output is ON, while white indicates OFF.
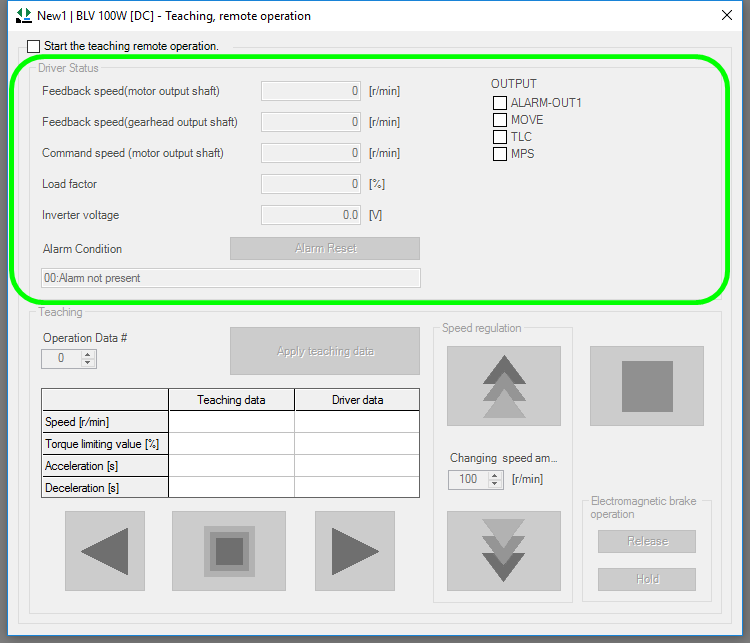
Real-time information, such as feedback speed (at the motor and gearhead output shaft), command speed, load factor, inverter voltage, and alarm code, are shown on the top right corner. Only certain output statutes are shown here. For advanced I/O status check, refer to I/O test operation.
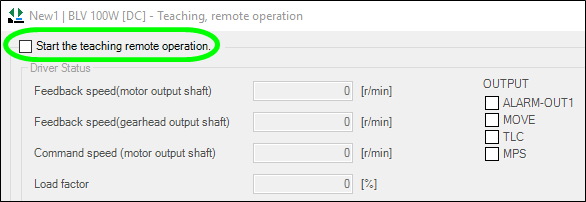
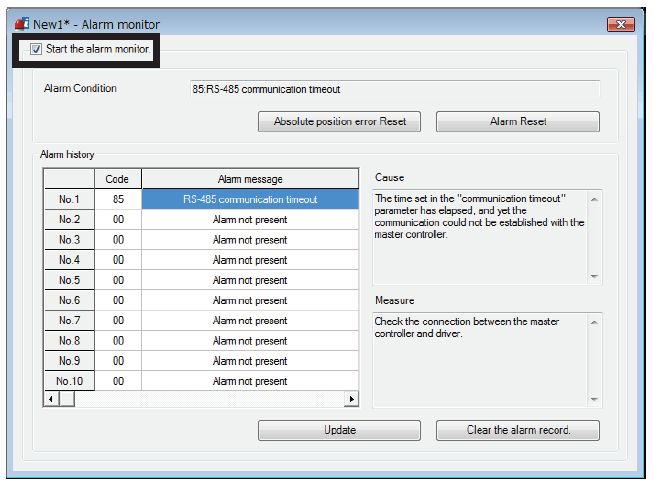
Remember to check the check box to start any teaching, remote, or monitor operation.
Monitor Operations - Many Available
There are many monitor operations you can perform to help with troubleshooting and understanding how the system works. We'll go over a few monitor operations here.
| Monitor operations include unit information monitor, status monitor, D-I/O, R-I/O monitor (direct I/O and remote I/O), internal I/O monitor, alarm monitor, warning monitor, RS-485 communication monitor, and waveform monitor. | 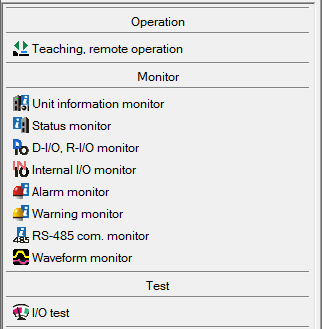 |
The alarm monitor is useful during troubleshooting because it shows the exact alarm code that is causing the alarm. It also retains up to 10 alarm records. Refer to the "Cause" and "Measure" to determine what to do.
The following screenshot shows an "RS-485 communication timeout". The cause is that the time set in the "communication timeout" parameter has elapsed without establishing communication. The fix is to check the connection between the master controller and driver. For more information, please refer to the manuals.
The waveform monitor records the timing of I/O as the system is operating. This is particularly useful during troubleshooting as you want to know what it's doing vs what it's supposed to do.
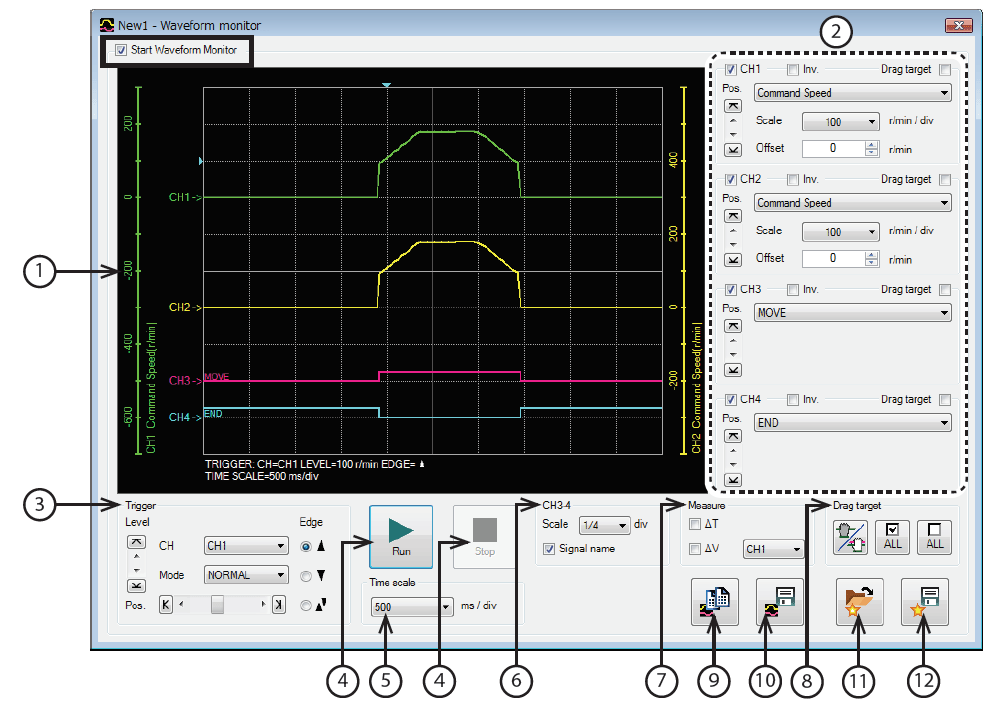
| 1 | Measurement results are drawn in this area. |
| 2 | The measurement conditions for each CH can be set. Refer to Step 3 for details. |
| 3 | Waveform measurement settings: Pos (trigger position), Level, CH, Mode, and Edge (detection condition) can be specified. For "CH," only those CHs displayed at8 1 can be specified. |
| 4 | Run: This button is used to start measurement. Stop: This button is used to stop measurement. |
| 5 | The measurement time range can be set. |
| 6 | The display method for CH3 and CH4 can be set. Scale: The display size can be selected from 1/1 (100%), 1/2 (50%), or 1/4 (25%). Signal name: The signal name can be shown or hidden. |
| 7 | The measure for measurement can be shown or hidden. Also, the CH to be measured can be selected. |
| 8 | The method to move the display position of the waveform drawn on the window can be selected. There are the following two moving methods. • Move the waveform per CH. • Move the waveform of the CH selected in88 2 simultaneously. |
| 9 | The currently displayed waveform can be copied to the clipboard. |
| 10 | The currently displayed waveform can be saved to an external file. Refer to p.52 for details. |
| 11 | The setting for measurement can be loaded from "Favorites data." Refer to p.52 for details. |
| 12 | The setting for measurement can be saved as "Favorites data." |
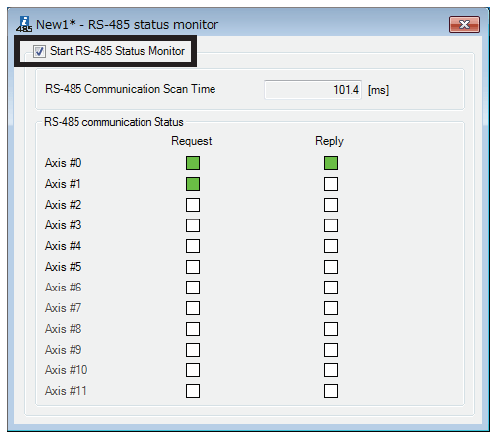
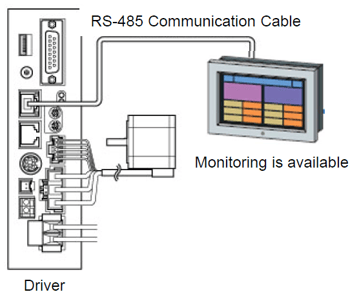
One more. The RS-485 status monitor checks the status of communication. This is particularly useful when trying to set up an RS-485 industrial network.
I/O Test
The I/O test checks real-time statuses of driver I/O; including direct I/O and remote I/O via RS-485. It's useful during troubleshooting to determine why something is not working.
| 3. Increased Usability |
Along with the major design changes mentioned above. There are some new functions that increases the usability of the BLV Series to improve machine operation.
DIR Output
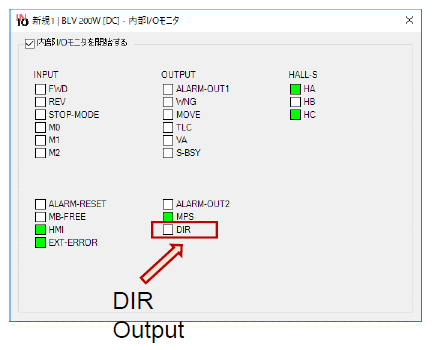
A rotation direction output was added to the BLV Series drivers. This allows the user to monitor the motor direction remotely. ON means forward, and OFF means reverse. In the past, the speed could be calculated by monitoring the pulses coming out of the SPEED-OUTPUT. However, the rotation direction could not be confirmed. We added this after receiving some feedback from the market.
Load Factor Monitor Commands
New monitor commands have been added for master-slave operations with upper level PLCs or HMIs. The original BLV Series drivers could not monitor the load fluctuation when operated via network communication, so we have improved the product by adding more monitor commands. Newly added load factor monitor commands include speed (gear shaft), speed decimal point position, conveyor traveling speed, conveyor traveling speed decimal point position, external analog speed setting, external analog torque limiting, and external analog voltage setting.
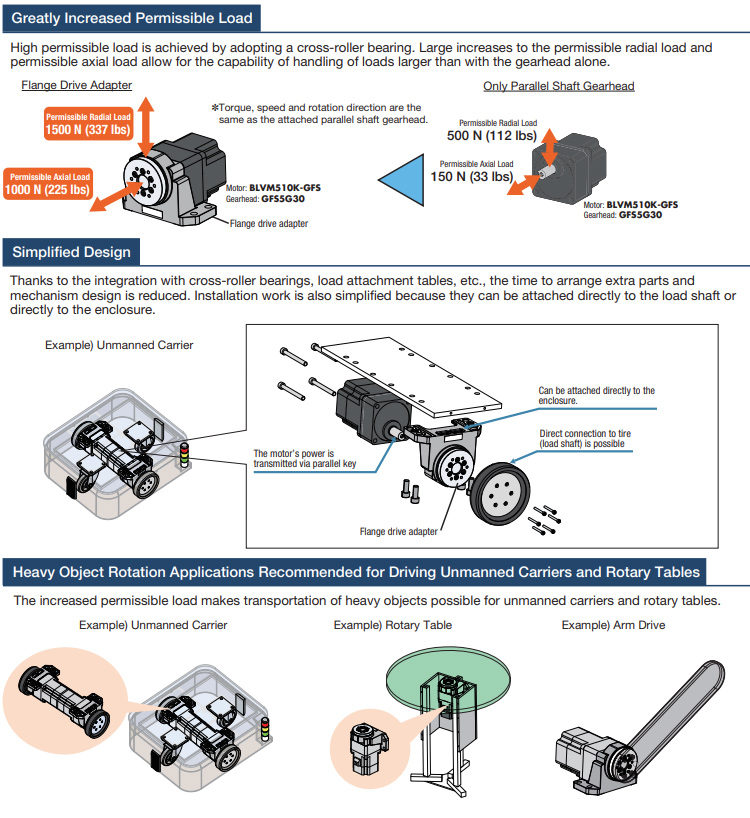
| Also: Flange Drive Adapter Simplifies Setup and Increases Both Radial and Axial Load | |
|
|
|


| Takeaway |
- BLV 100 W parallel shaft gear motors and FR flat hollow shaft gear motors have been added to the BLV Series as a result of AGV and material handling feedback.
- The easy-to-use MEXE02 support software is now compatible with all BLV Series drivers.
- New DIR output and network monitor commands increase the usability of the BLV Series.
The BLV Series is ideal for for customers who require DC or battery-powered brushless motors, conveyor manufacturers, and customers who require industrial network communication. The FR gearhead is recommended for high torque applications where motor length is also a constraint. The addition of MEXE02 software support for the BLV Series enables many benefits, such as easy data programming and status monitoring.

Learn more about the AGV-specific functions of the BLV Series.
Please subscribe!


