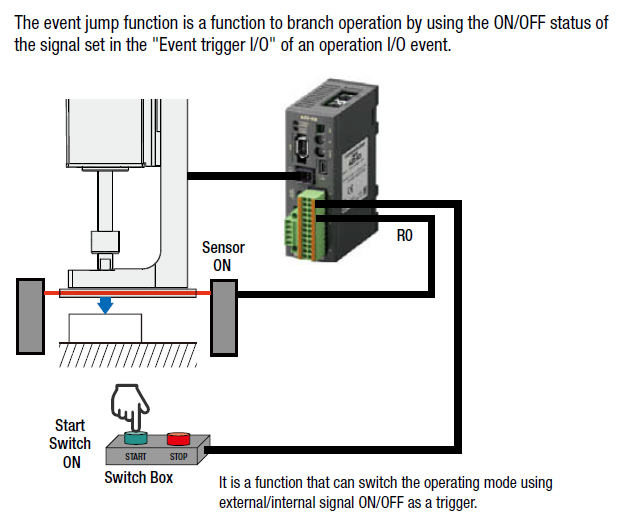
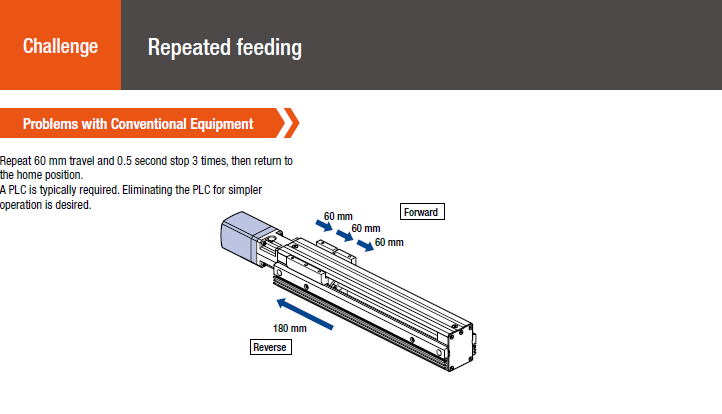
In this blog post, I will explain how to easily program a timed pressing operation with our MEXE02 universal product support software. This example works for any products included in the AlphaStep AZ Series family, which also includes other series that use the same technology and software.
Read More
Topics:
Stepper Motors,
Absolute Positioning,
Alphastep Hybrid Control,
Linear & Rotary Actuators,
VIDEOS,
Software,
Application Examples,
Motion Control Basics
No matter how many functions a product offers, without an intuitive, easy-to-use software, those functions can be difficult to implement.
Read More
Topics:
Stepper Motors,
Absolute Positioning,
Alphastep Hybrid Control,
Linear & Rotary Actuators,
VIDEOS,
Software,
Application Examples,
Motion Control Basics
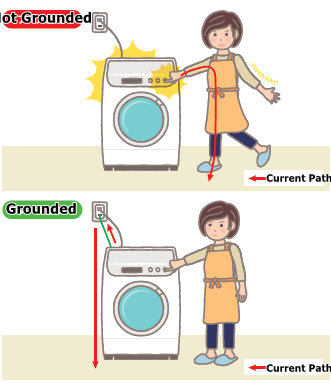
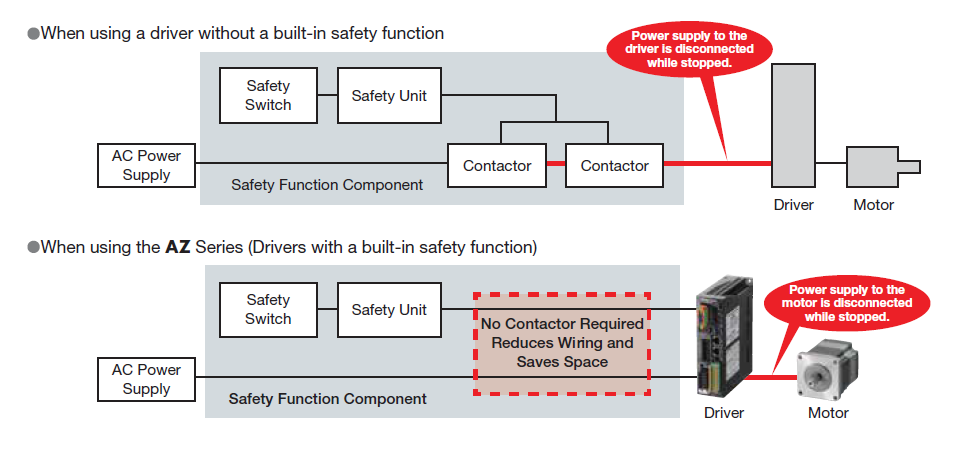
STO, or "Safe Torque Off", is a dedicated, built-in safety circuit function that makes safety easier to manage for motion devices, such as an industrial robot. It is part of the overall safety system designed to prevent injuries or damage.
Read More
Topics:
Stepper Motors,
Absolute Positioning,
Alphastep Hybrid Control,
Linear & Rotary Actuators
Knowing how to use a product properly can make a huge difference in its performance and life. For example, knowing how to maintain cast iron pans properly can make them last longer. With electric motors, understanding the factors that affect motor life is the first step to extending life and decreasing costs in the long run.
Read More
Topics:
AC Motors,
Stepper Motors,
Linear & Rotary Actuators,
Speed Control,
Servo Motors,
Service Life
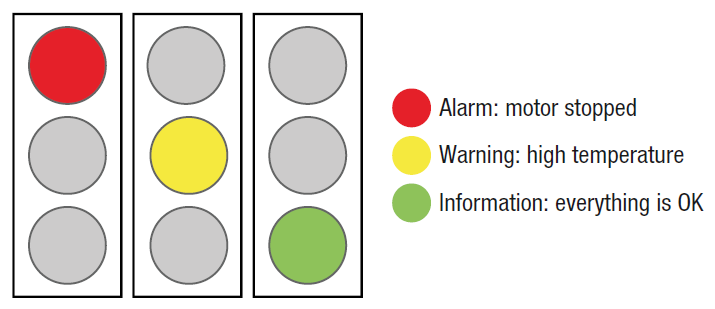
For automated factories, motor failures mean lost production and lost revenue. Being able to identify the specific issue in advance and its location is critical to maintaining production efficiency. To be successful, extra sensors must be added to detect abnormalities. There may be an easier way.
Read More
Topics:
Stepper Motors,
Alphastep Hybrid Control,
Linear & Rotary Actuators,
VIDEOS,
Network,
Application Examples,
Troubleshooting
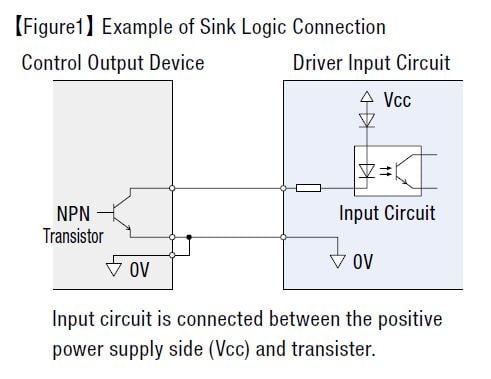
For someone who has never had experience wiring I/O for motion control, it can be scary the first time. If devices are not wired correctly, it can cause a range of issues from a motor simply not doing what's expected to irreversible product damage. I still get that nervous feeling before I press the START button on a demo. Murphy's Law, anyone?
Read More
Topics:
AC Motors,
Stepper Motors,
Alphastep Hybrid Control,
Linear & Rotary Actuators,
Speed Control,
BLDC Motors,
Servo Motors,
Motion Control Basics
A gripper is typically an end effector that is installed at the end of a robotic arm or on a cartesian robot and can be used to grip parts in order to transfer them from one location to another. However, there's more to it than just closing the jaws to pinch a part.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear & Rotary Actuators,
VIDEOS,
Application Examples
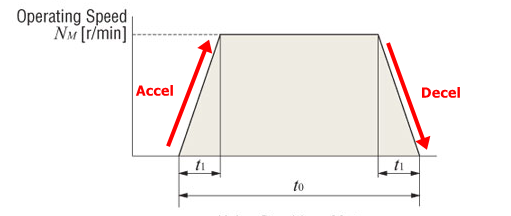
Now that we understand the calculations behind load torque and load inertia, we're a little closer to motor selection. You might be wondering why I separated load torque and acceleration torque calculations. That's because in order to calculate for acceleration torque, load inertia and speed must be calculated first.
Read More
Topics:
AC Motors,
Stepper Motors,
Alphastep Hybrid Control,
Linear & Rotary Actuators,
Speed Control,
Motor Sizing,
BLDC Motors,
Servo Motors,
Motion Control Basics