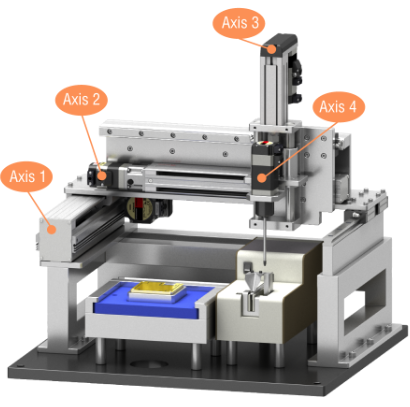
Automating screw tightening is no longer just about speeding up assembly; it’s also about ensuring consistent quality, reducing defects, and enabling scalable production. For automation engineers, one of the most effective architectures for achieving this is a multi-axis Cartesian system that combines precise positioning, controlled pressing, and accurate torque delivery.
In this article, we’ll walk you through how a 4-axis automated screw tightening machine can be built using electric linear actuators, and how Oriental Motor’s integrated motor and actuator solutions can simplify designs while improving performance.
Read More
Topics:
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
VIDEOS,
Application Examples,
XYZ/Cartesian/Gantry,
Case Studies
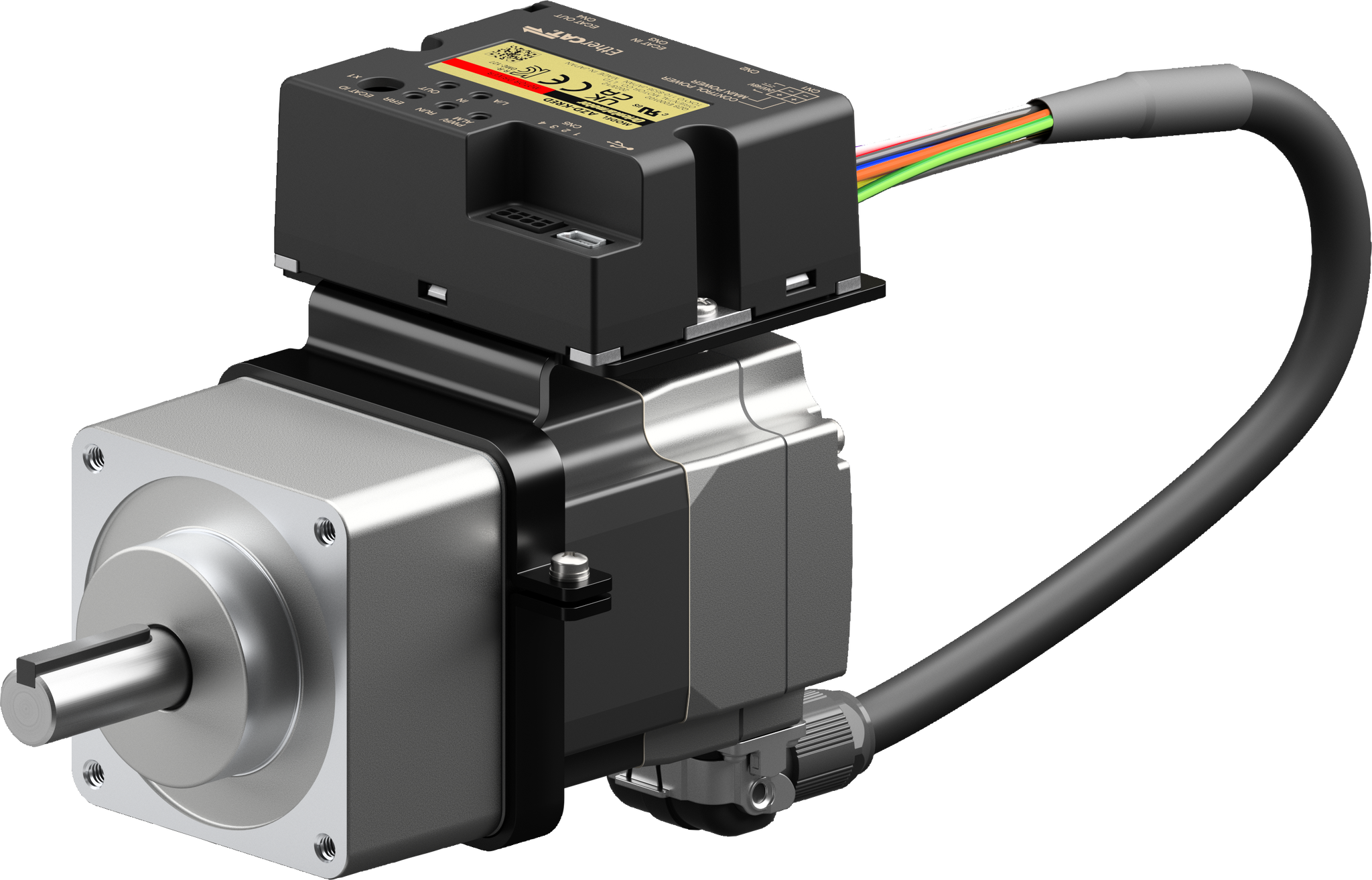
Modern automation increasingly demands higher reliability, faster time-to-build, and easier scalability in a smaller package. If you’ve ever wished you had an easy button for motion control, Oriental Motor’s αSTEP Hybrid Step-Servo AZ Series product family lets you build your own compact, modular motion control solution by choosing off-the-shelf products.
Read More
Topics:
Stepper Motors,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
VIDEOS,
Product Introductions
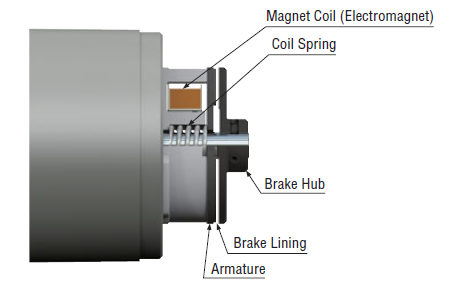
Motors with built-in electromagnetic brakes enhance safety by preventing unexpected movement during power failures, which is crucial for medical applications where precision, safety, and reliability are essential.
Read More
Topics:
AC Motors,
Stepper Motors,
Robotics,
Absolute Positioning,
Linear Actuators,
VIDEOS,
BLDC Motors,
Vertical Lifts,
Application Examples,
Service Life,
Medical,
Laboratory,
Incremental Positioning
Interested in industrial robots but not sure where to start? Learn how Oriental Motor's compact and easy-to-use small industrial robots, robot controllers, and software can help simplify robotic automation.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
VIDEOS,
Software,
Application Examples,
Product Introductions,
XYZ/Cartesian/Gantry
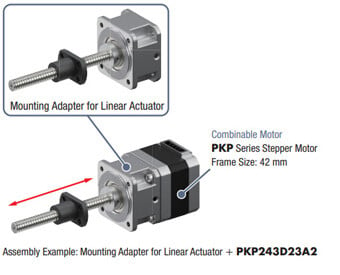
The popularity of micro linear actuators has been steadily increasing, driven by the need to increase productivity in confined spaces. To help meet the demand of the miniaturization trend, Oriental Motor has developed a compact linear actuator that can be attached to an off-the-shelf stepper motor.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Linear Actuators,
VIDEOS,
Application Examples,
Product Introductions,
Medical,
Incremental Positioning
An end effector, such as an electric gripper, is an essential part of industrial robots. More importantly, using the right gripper for the load being transferred prevents damage while improving automation efficiency. In this article, we share how one system integrator has successfully adopted an electric gripper for one of their articulated robots.
Read More
Topics:
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
VIDEOS,
Application Examples,
Medical,
Food & Packaging,
Case Studies,
Factory Automation
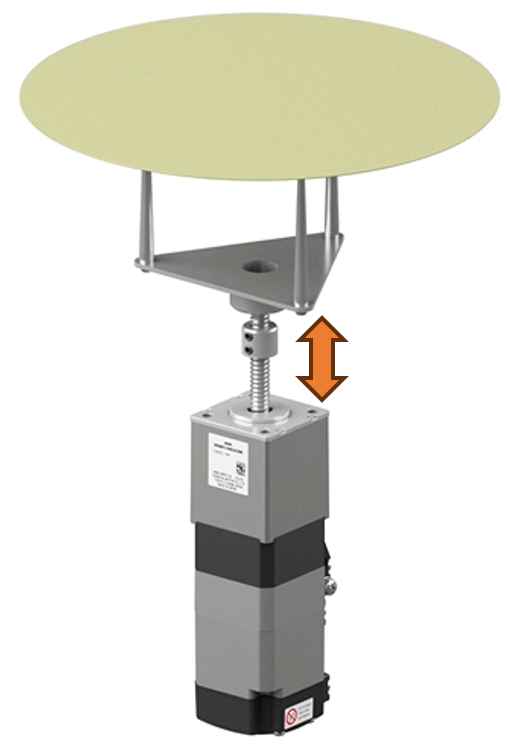
Downtime is a no no for semiconductor fabs. Even a brief interruption can result in significant financial losses and disruptions in production. In this article, we explain how a linear actuator's built-in precision and reliability can simplify and even improve the design of wafer processing machinery, such as a silicon wafer pin lift.
Read More
Topics:
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
Vertical Lifts,
Application Examples,
Wafer Pin Lifters,
Semiconductors,
Factory Automation
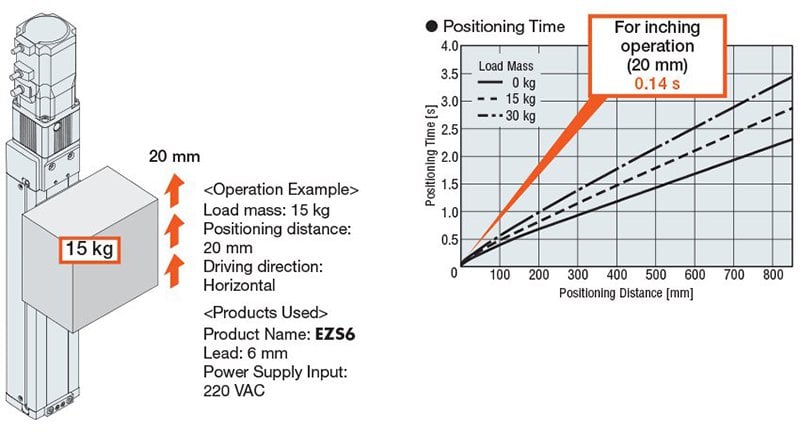
As the packaging industry continues to evolve, the demand for efficient and reliable machinery is on the rise. One area that has seen significant advancements is in the use of electric actuators. Traditionally, pneumatic actuators have been the go-to choice for many packaging and labeling machines. However, electric actuators are gaining popularity due to their numerous benefits. In this article, we will explore the numerous advantages that electric actuators bring to packaging machinery.
Read More
Topics:
Stepper Motors,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
VIDEOS
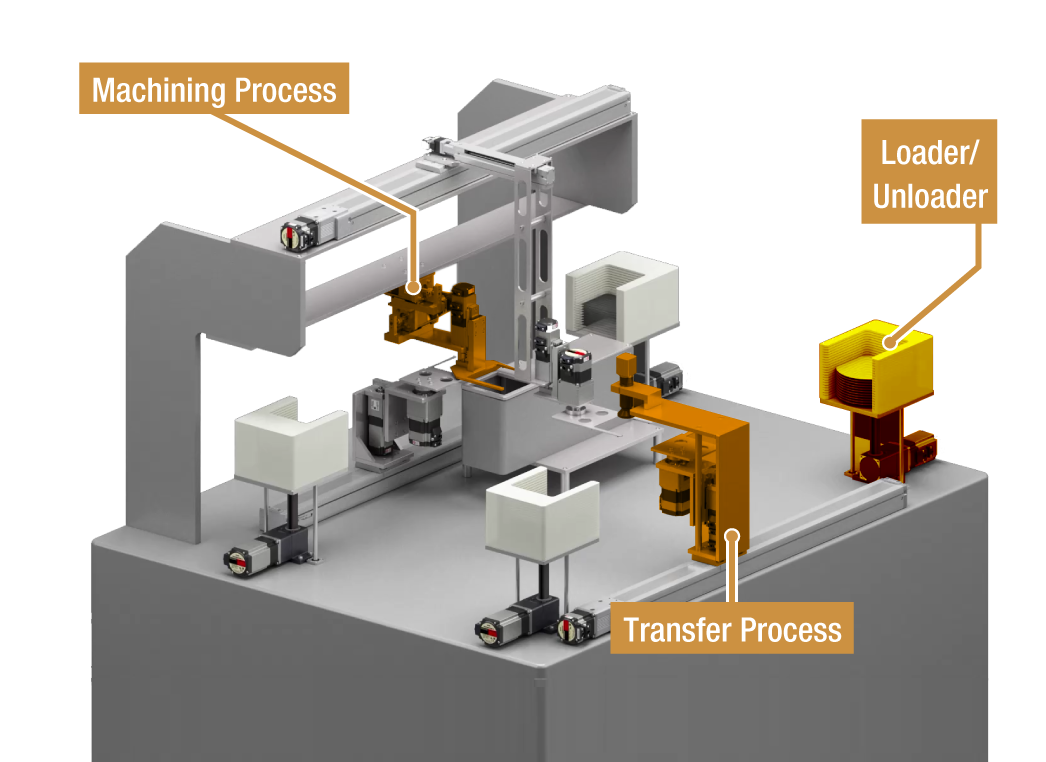
The growing demand for semiconductors, driven by technological advancements like AI, IoT, and robotics, makes it crucial to handle these delicate wafers efficiently and precisely. In this article, we will explain how unified features from a family of motors and actuators can simplify automation for semiconductor wafer manufacturing.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
VIDEOS,
Vertical Lifts,
Application Examples,
Wafer Handling,
Semiconductors,
Factory Automation
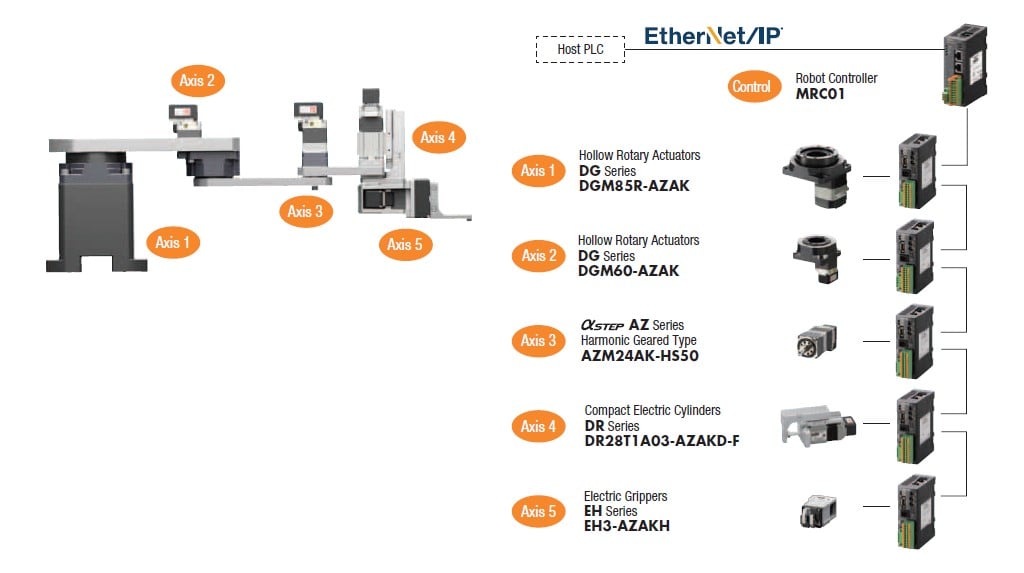
Robotics automation can be easier to build than you think. Here's an example of how a 5-axis SCARA robot can be built in-house with off-the-shelf products.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
Motor Sizing,
VIDEOS,
Software,
Network,
Application Examples,
Rotary Actuators/Index Tables