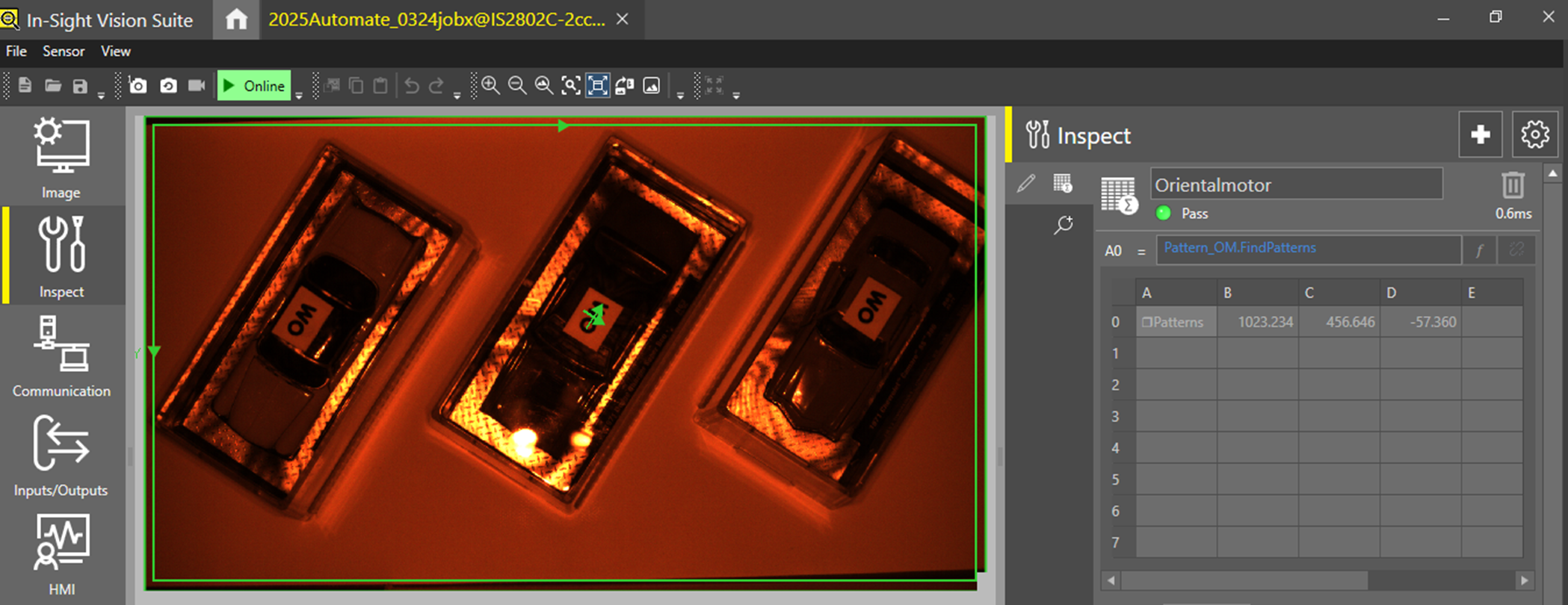
Building a robot is not easy. Programming a robot can be even more challenging without user-friendly software. In this article, I'll explain a few of the MRC Studio's most useful features and demonstrate how the Robot Vision Calibration function can help reduce costs for your vision-enabled robots.
Read More
Topics:
Robotics,
Software,
Application Examples,
Case Studies,
Product Demos
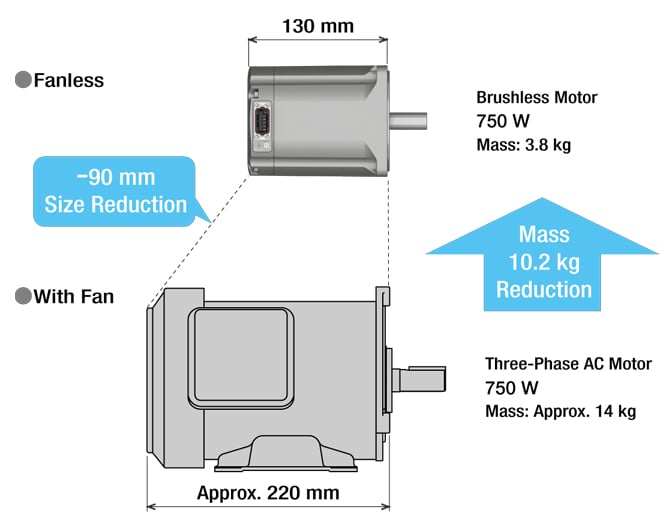
For machine designers who typically specify 3-phase AC induction motors and VFDs to meet variable speed requirements, brushless DC (BLDC) motors can be a cheat code to designing smaller, lighter, and more efficient machines. This article compares our 750 W (1 HP) Brushless DC Motor to an equivalent AC motor in efficiency, size/weight, and performance.
Read More
Topics:
AC Motors,
Speed Control,
BLDC Motors,
Application Examples,
Product Introductions
In industrial automation, cooling fans are used to cool electronics so that equipment can last longer. However, knowing which type of fan to apply to your machine design can be tricky. In this article, I explain how fans affect the life of electronics and compare the characteristics of the 3 most common types of cooling fans.
Read More
Topics:
Cooling Fans,
Application Examples
CVD Series stepper drivers are the best choice for PKP Series high-torque stepper motors due to their unique abilities to reduce different types of motor vibrations and optimize performance.
Read More
Topics:
Stepper Motors,
Smooth Drive,
VIDEOS,
Stepper Drivers,
Incremental Positioning
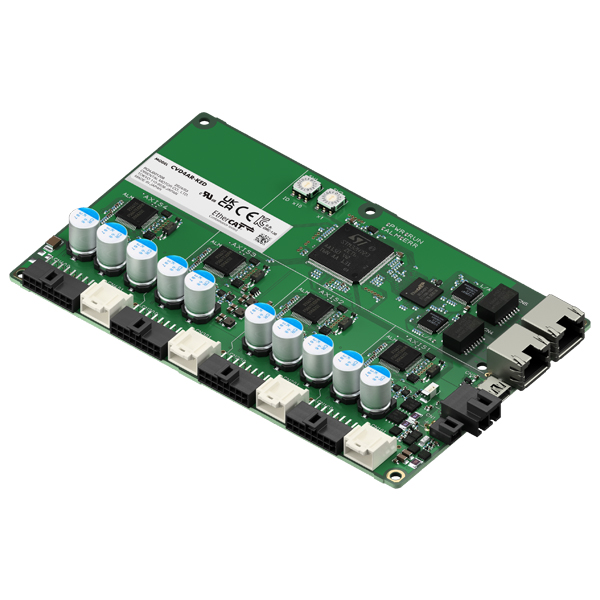
A network-compatible multi-axis driver can save space and reduce costs by combining multiple stepper motor drive circuits in a single product and minimizing the number of cables necessary for motion control.
Read More
Topics:
Stepper Motors,
VIDEOS,
Application Examples,
Product Introductions,
Semiconductors,
Stepper Drivers,
Incremental Positioning
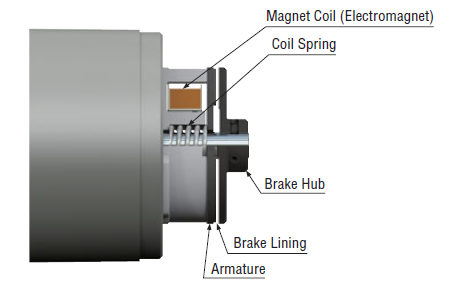
Motors with built-in electromagnetic brakes enhance safety by preventing unexpected movement during power failures, which is crucial for medical applications where precision, safety, and reliability are essential.
Read More
Topics:
AC Motors,
Stepper Motors,
Robotics,
Absolute Positioning,
Linear Actuators,
VIDEOS,
BLDC Motors,
Vertical Lifts,
Application Examples,
Service Life,
Medical,
Laboratory,
Incremental Positioning
In the factories of the future, wireless motion control will offer unprecedented flexibility for mobile machines and space-constrained applications. This comprehensive guide walks engineers through implementing wireless motion control using Oriental Motor's AZ Series Ethernet Type mini Driver, eliminating cables while maintaining precise motion control.
Read More
Topics:
Stepper Motors,
Robotics,
Alphastep Hybrid Control,
VIDEOS,
Software,
Network,
Product Demos
AC induction motors are the workhorses that power many types of conveyors to transport materials. However, there's a smaller but mightier type of motor that can help enhance the design and performance of conveyors for many industries.
Read More
Topics:
Speed Control,
VIDEOS,
BLDC Motors,
Application Examples,
Product Introductions,
Food & Packaging,
Grip Conveyors,
Conveyors,
Factory Automation
For speed synchronization applications like a dual belt labeling conveyor, multiple motors must run at the same speed. What is the best type of motor to use and what are the methods to achieve this? Our application engineer set up a product demonstration to show you how this can be done with one potentiometer.
Read More
Topics:
Speed Control,
VIDEOS,
BLDC Motors,
Grip Conveyors,
Conveyors,
Product Demos
Interested in industrial robots but not sure where to start? Learn how Oriental Motor's compact and easy-to-use small industrial robots, robot controllers, and software can help simplify robotic automation.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
VIDEOS,
Software,
Application Examples,
Product Introductions,
XYZ/Cartesian/Gantry