As the packaging industry continues to evolve, the demand for efficient and reliable machinery is on the rise. One area that has seen significant advancements is in the use of electric actuators. Traditionally, pneumatic actuators have been the go-to choice for many packaging and labeling machines. However, electric actuators are gaining popularity due to their numerous benefits. In this article, we will explore the numerous advantages that electric actuators bring to packaging machinery.
Read More
Topics:
Stepper Motors,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
VIDEOS
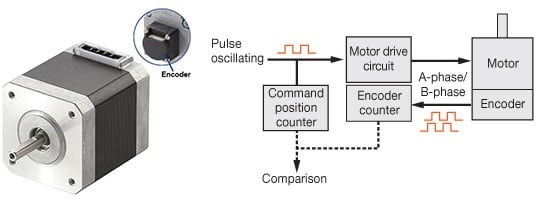
Encoder feedback is essential for closed-loop motion control and can enhance accuracy, reliability, and even efficiency for machinery and robotics. In this article, we compare how optical, magnetic, and capacitive encoders work and share some selection tips.
Read More
Topics:
Stepper Motors,
Absolute Positioning,
Alphastep Hybrid Control,
Product Introductions,
Encoders
The growing demand for semiconductors, driven by technological advancements like AI, IoT, and robotics, makes it crucial to handle these delicate wafers efficiently and precisely. In this article, we will explain how unified features from a family of motors and actuators can simplify automation for semiconductor wafer manufacturing.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
VIDEOS,
Vertical Lifts,
Application Examples,
Wafer Handling,
Semiconductors,
Factory Automation
Oriental Motor provides a wide variety of products to meet semiconductor equipment design goals. This post focuses on motor selection for two specific motion axes of a semiconductor manufacturing process called CMP (Chemical Mechanical Polishing) and explains how to save time by using different products from the same family.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
VIDEOS,
Gearheads,
Application Examples,
Rotary Actuators/Index Tables,
Chemical Mechanical Polishing,
Semiconductors,
Factory Automation
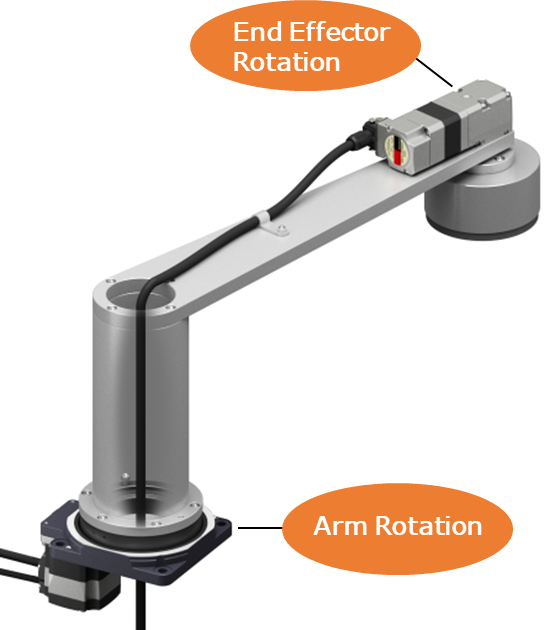
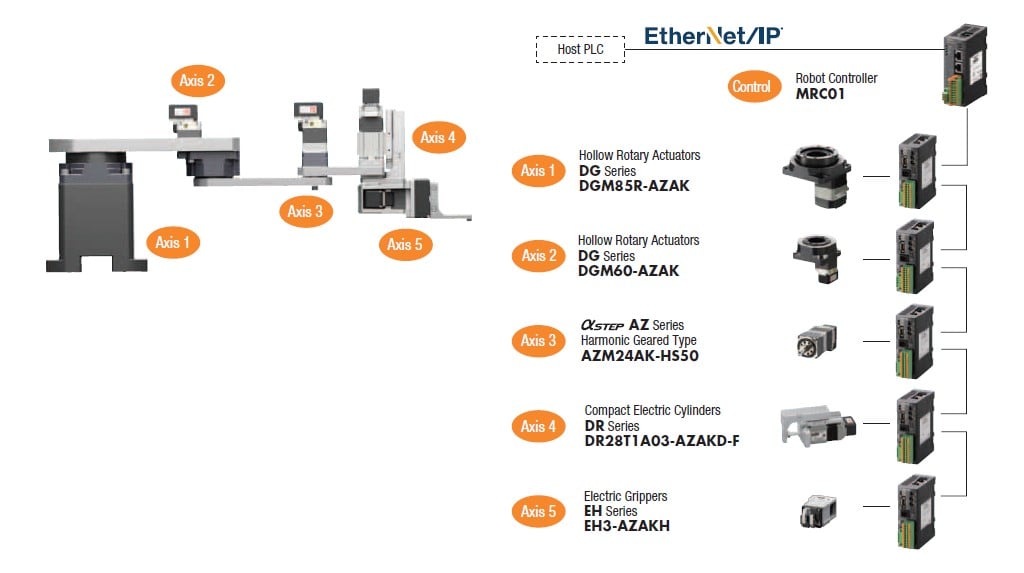
Robotics automation can be easier to build than you think. Here's an example of how a 5-axis SCARA robot can be built in-house with off-the-shelf products.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
Motor Sizing,
VIDEOS,
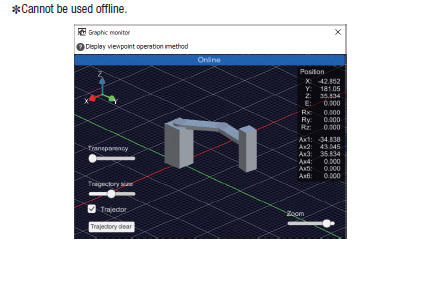
Software,
Network,
Application Examples,
Rotary Actuators/Index Tables
Robots are increasing in demand due to continuing labor shortages and the push for error-less efficiency in manufacturing. In the meantime, other companies are falling behind because they either do not have the capital or engineering know-how to implement robotics automation. While you can buy a robot and pay someone else to program it to do what you want, building and programming your own robot can be easier than you think.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
VIDEOS,
Software,
Network,
Application Examples,
Product Introductions
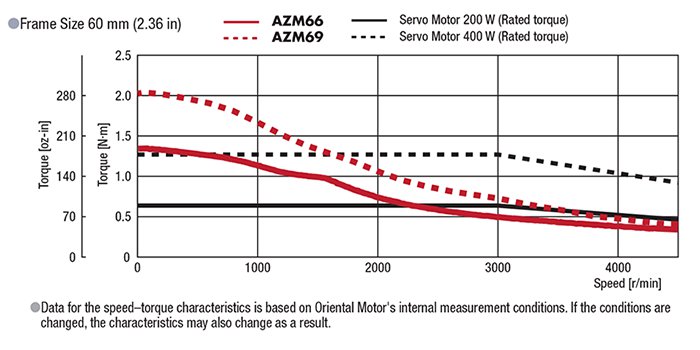
Servo motor systems are expensive but great for demanding applications that require high speed, peak torque, or feedback. Stepper motors are cost-effective but do not offer the peace of mind of feedback. For designs that do not need the bells and whistles of servo motor systems, there is another option.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
Servo Motors,
Network
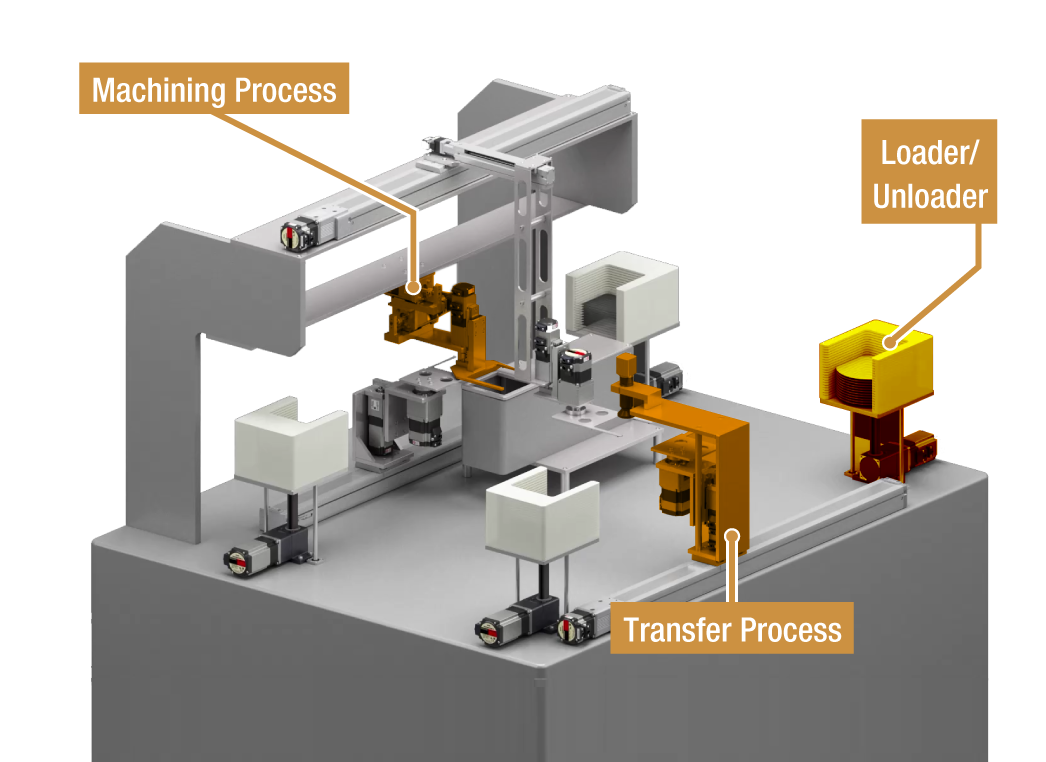
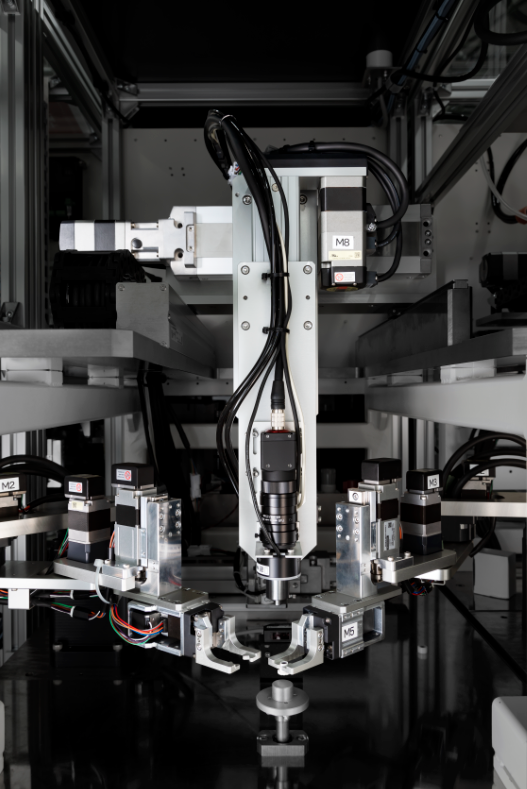
In this post, we introduce a real-world SCARA and cartesian/gantry robot example of in-house automation built using our AlphaStep AZ Series family of motors, actuators, drivers, and our 4-axis robot controller.
Read More
Topics:
Stepper Motors,
Robotics,
Absolute Positioning,
Alphastep Hybrid Control,
Linear Actuators,
Software,
Rotary Actuators/Index Tables,
XYZ/Cartesian/Gantry,
Case Studies
Modular automation is the next phase of factory automation where a production line can be separated into mobile modules and can be quickly reconfigured for different purposes. This article explains the benefits of modular automation and shows how smaller, lighter, and battery-driven motors can help.
Read More
Topics:
Stepper Motors,
Robotics,
Alphastep Hybrid Control,
Linear Actuators,
Speed Control,
VIDEOS,
BLDC Motors,
Application Examples,
AGV/AMR
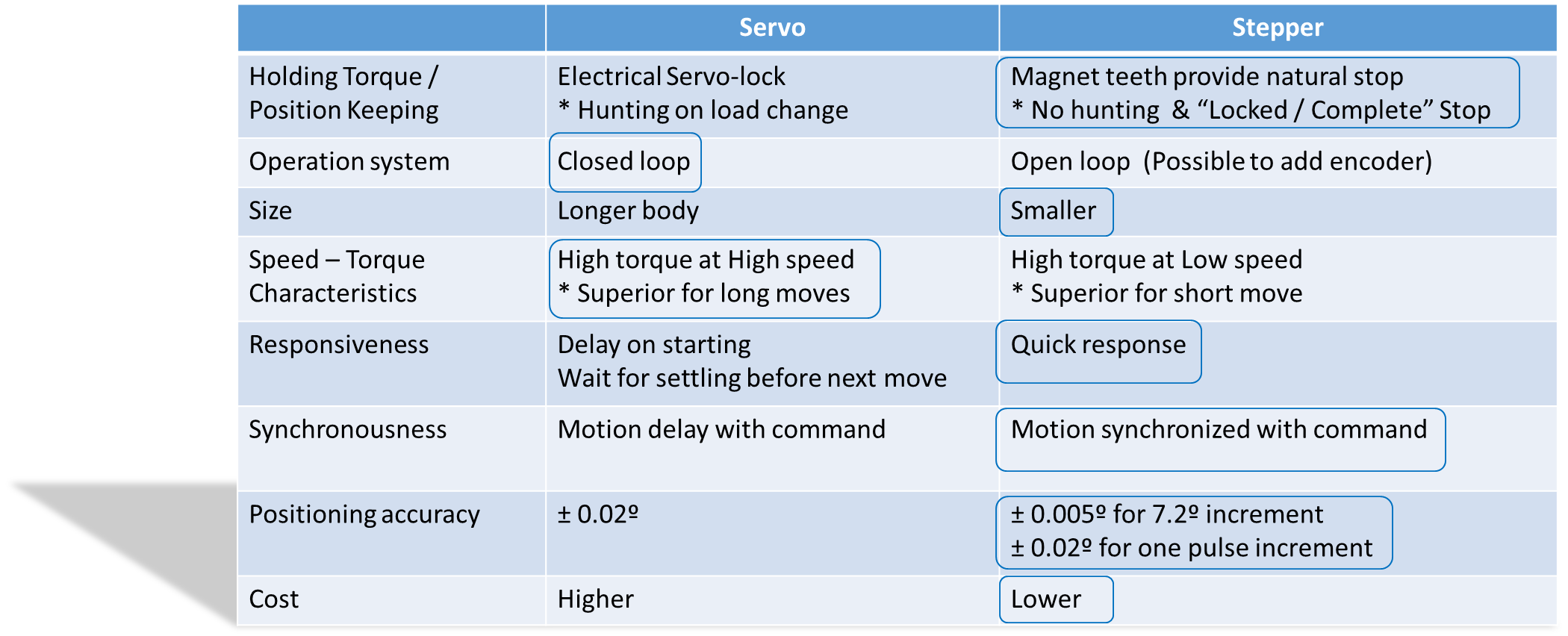
The best motor is the one that meets the application requirements. However, when both servo motors and stepper motors satisfy the basic requirements of a positioning application, it's important to have a deeper understanding of the two technologies to make an informed decision.
In this article, I will summarize the differences between servo motor systems and stepper motor systems.
Read More
Topics:
Stepper Motors,
Absolute Positioning,
Alphastep Hybrid Control,
Servo Motors,
Network,
Service Life